ਸ਼ੁਰੂ ਕੀਤਾ ਜਾ ਰਿਹਾ ਹੈ - PhotoRobot ਉਪਭੋਗਤਾ ਸਮਰਥਨ
PhotoRobot ਕੰਟਰੋਲ ਐਪ (ਜਿਸਨੂੰ ਅੱਗੇ “CAPP” ਕਿਹਾ ਜਾਂਦਾ ਹੈ) ਸਮੱਗਰੀ ਉਤਪਾਦਨ ਪ੍ਰਕਿਰਿਆਵਾਂ (ਚਿੱਤਰ, ਵੀਡੀਓ, 360s, ਅਤੇ 3D ਮਾਡਲ) ਨੂੰ ਸਵੈਚਾਲਤ ਕਰਨ ਲਈ ਤਿਆਰ ਕੀਤਾ ਗਿਆ ਹੈ। ਇਸ ਗਾਈਡ ਵਿੱਚ 4 ਭਾਗ ਹਨ, ਹਰ ਇੱਕ ਪ੍ਰਕਿਰਿਆ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ।
- ਸੈੱਟਅੱਪ - ਇੱਕ ਵਰਕਸਪੇਸ ਬਣਾਓ: ਕੈਮਰੇ, ਹਾਰਡਵੇਅਰ, ਅਤੇ ਪ੍ਰੋਜੈਕਟ
- ਕੈਪਚਰ - ਹਾਰਡਵੇਅਰ ਅਤੇ ਕੈਮਰਿਆਂ PhotoRobot ਨਿਯੰਤਰਣ, ਚਿੱਤਰ ਅਤੇ ਵੀਡੀਓ ਕੈਪਚਰ ਕਰਨਾ
- ਸੋਧੋ - ਪ੍ਰਕਿਰਿਆ ਤੋਂ ਬਾਅਦ ਵਿਜ਼ੂਅਲ ਸਮੱਗਰੀ
- ਪਬਲਿਸ਼ - ਕਈ ਫਾਰਮੈਟਾਂ ਵਿੱਚ ਆਉਟਪੁੱਟ ਚਿੱਤਰ ਬਣਾਓ, "ਪ੍ਰੋਫਾਈਲਾਂ ਦਾ ਪ੍ਰਬੰਧਨ ਕਰੋ"
PhotoRobot ਕੰਟਰੋਲ ਐਪ ਨੂੰ ਇੰਸਟਾਲ ਕਰਨਾ
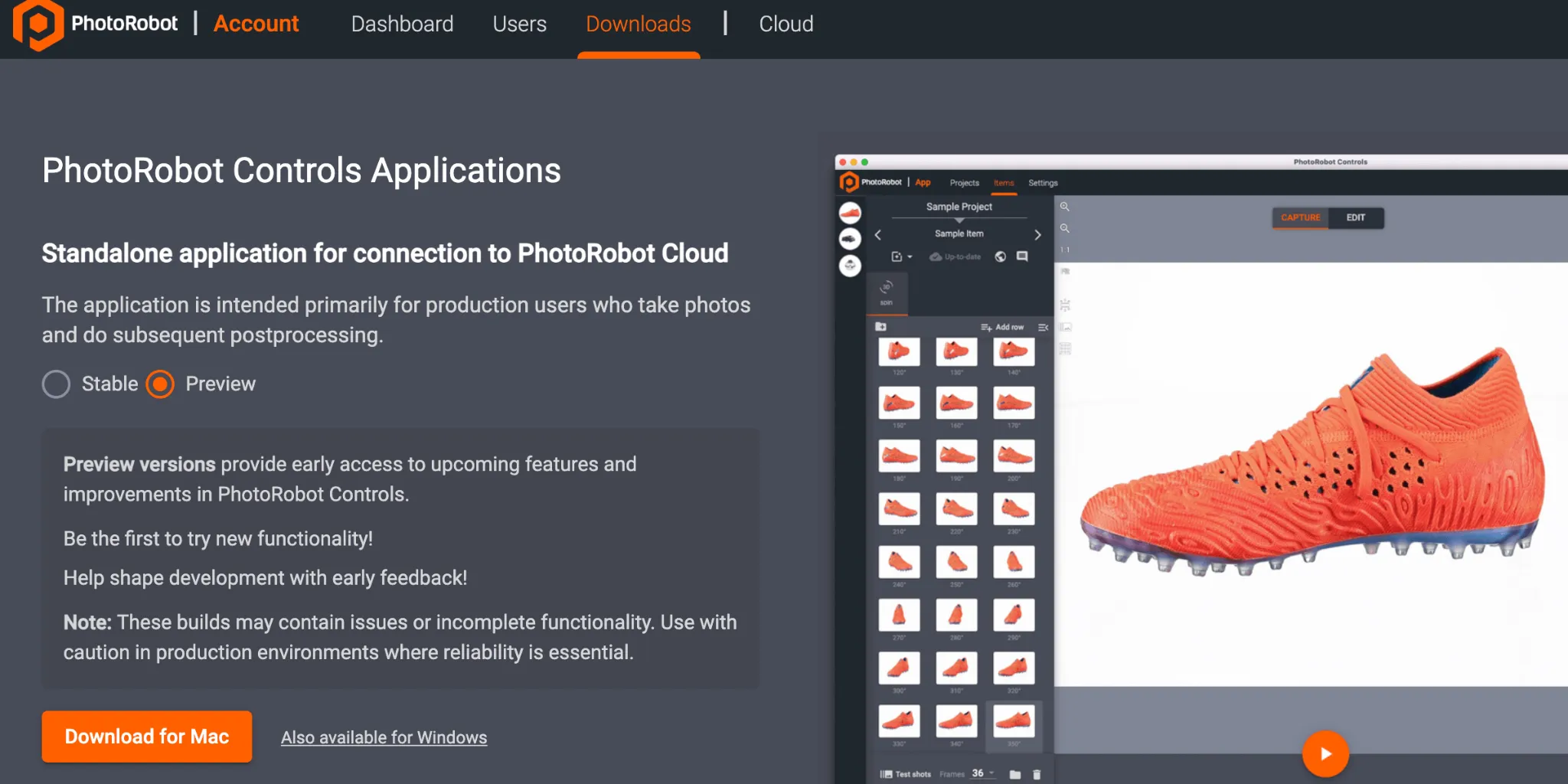
ਆਪਣੇ ਕੰਪਿਊਟਰ 'ਤੇ PhotoRobot ਕੰਟਰੋਲਜ਼ ਐਪ ਨੂੰ ਇੰਸਟਾਲ ਕਰਨ ਲਈ, ਆਪਣੇ PhotoRobot ਖਾਤੇ ਵਿੱਚ ਲੌਗਇਨ ਕਰੋ ਅਤੇ PhotoRobot ਡਾਊਨਲੋਡਾਂ 'ਤੇ ਜਾਓ।
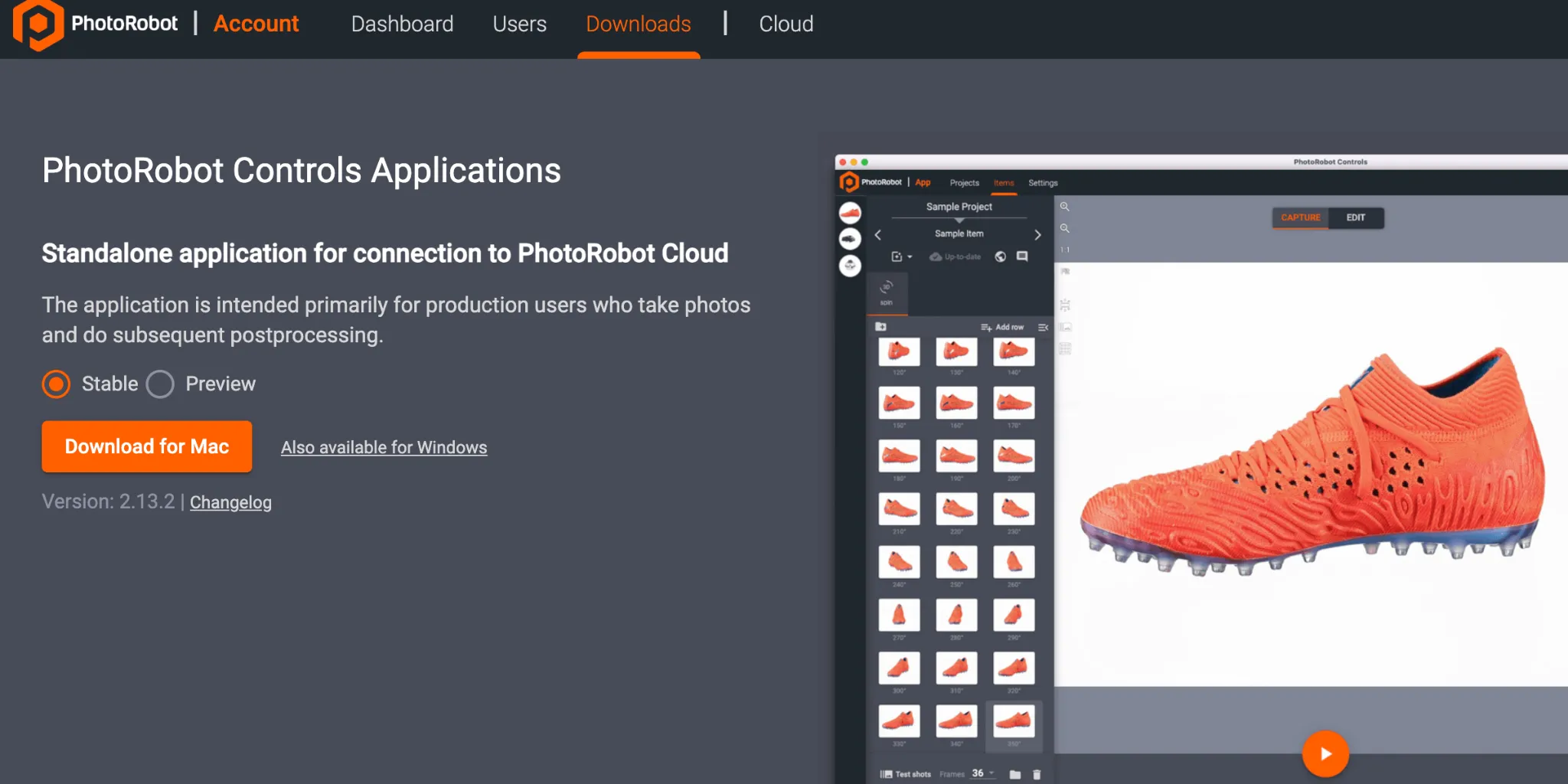
ਨੋਟ: ਸਥਿਰ ਸੰਸਕਰਣ ਅਤੇ CAPP ਦਾ ਪੂਰਵਦਰਸ਼ਨ ਸੰਸਕਰਣ ਦੋਵੇਂ ਇੰਸਟਾਲਰ ਵਿਜ਼ਾਰਡ ਦੁਆਰਾ ਡਾਊਨਲੋਡ ਕਰਨ ਲਈ ਉਪਲਬਧ ਹਨ। ਸਥਿਰ ਸੰਸਕਰਣ ਵਿੱਚ CAPP ਦਾ ਸਭ ਤੋਂ ਤਾਜ਼ਾ ਸੰਸਕਰਣ ਹੁੰਦਾ ਹੈ, ਅਤੇ ਅਕਸਰ ਸੰਸਕਰਣ ਜਾਰੀ ਹੁੰਦਾ ਹੈ। ਇਸ ਦੌਰਾਨ, ਸੀਏਪੀਪੀ ਦਾ ਪੂਰਵਦਰਸ਼ਨ ਸੰਸਕਰਣ ਬਹੁਤ ਨਵੀਨਤਮ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਅਤੇ ਫਿਕਸ ਤੱਕ ਸ਼ੁਰੂਆਤੀ ਪਹੁੰਚ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ ਜੋ ਵਿਕਾਸ ਦੇ ਦਿਨਾਂ ਦੇ ਅੰਦਰ ਸਥਿਰ ਸੰਸਕਰਣ ਵਿੱਚ ਤਬਦੀਲ ਹੋ ਜਾਂਦੇ ਹਨ. ਇਹ ਉਪਭੋਗਤਾਵਾਂ ਨੂੰ ਸਹਾਇਤਾ ਨਾਲ ਸੰਪਰਕ ਕਰਨ ਤੋਂ ਪਹਿਲਾਂ ਪੂਰਵਦਰਸ਼ਨ ਸੰਸਕਰਣ ਵਿੱਚ ਵਾਪਰਨ ਵਾਲੇ ਕਿਸੇ ਵੀ ਮੁੱਦੇ ਦੀ ਜਾਂਚ ਕਰਨ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ, ਕਿਉਂਕਿ ਸਥਿਰ ਸੰਸਕਰਣ 'ਤੇ ਜ਼ਿਆਦਾਤਰ ਰਿਪੋਰਟ ਕੀਤੇ ਗਏ ਮੁੱਦੇ ਪਹਿਲਾਂ ਹੀ ਪੂਰਵਦਰਸ਼ਨ ਸੰਸਕਰਣ 'ਤੇ ਹੱਲ ਹੋ ਚੁੱਕੇ ਹਨ. ਹਾਲਾਂਕਿ, ਧਿਆਨ ਰੱਖੋ ਕਿ ਪੂਰਵਦਰਸ਼ਨ ਸੰਸਕਰਣ ਨੂੰ ਉਤਪਾਦਨ ਦੀ ਵਰਤੋਂ ਲਈ ਸਿਫਾਰਸ਼ ਨਹੀਂ ਕੀਤੀ ਜਾਂਦੀ ਜਿਸ ਵਿੱਚ ਸਥਿਰਤਾ ਇੱਕ ਮਹੱਤਵਪੂਰਣ ਕਾਰਕ ਹੈ. ਪੂਰਵਦਰਸ਼ਨ ਸੰਸਕਰਣ ਕਿਰਿਆਸ਼ੀਲ ਵਿਕਾਸ ਅਧੀਨ ਹੈ, ਜਿਸ ਵਿੱਚ ਅਜੇ ਵੀ ਅਧੂਰੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਜਾਂ ਅਣਸੁਲਝੇ ਬੱਗ ਸ਼ਾਮਲ ਹੋ ਸਕਦੇ ਹਨ।
ਮਹੱਤਵਪੂਰਨ: ਡਾਟਾਬੇਸ ਭ੍ਰਿਸ਼ਟਾਚਾਰ ਦੇ ਜੋਖਮ ਕਾਰਨ ਸੀਏਪੀਪੀ ਦੇ ਪੁਰਾਣੇ ਸੰਸਕਰਣ ਗਾਹਕ ਜਾਂ ਜਨਤਕ ਵੰਡ ਲਈ ਨਹੀਂ ਹਨ। CAPP ਦੇ ਪੁਰਾਣੇ ਸੰਸਕਰਣ ਕੇਵਲ ਅੰਦਰੂਨੀ ਵਿਕਾਸ ਲਈ, ਜਾਂ ਬਹੁਤ ਵਿਸ਼ੇਸ਼ ਵਰਤੋਂ ਦੇ ਮਾਮਲਿਆਂ ਲਈ ਅਧਿਕਾਰਤ PhotoRobot ਟੈਕਨੀਸ਼ੀਅਨਾਂ ਲਈ ਪਹੁੰਚਯੋਗ ਹਨ।
CAPP ਦੇ ਨਵੀਨਤਮ ਸਥਿਰ ਸੰਸਕਰਣ ਅਤੇ ਪੂਰਵਦਰਸ਼ਨ ਸੰਸਕਰਣ ਨੂੰ ਲੱਭਣ ਲਈ, CAPP ਨਵੀਨਤਮ ਡਾਊਨਲੋਡ ਸੰਸਕਰਣ ਵੇਖੋ।
ਸਵੈ-ਇੰਸਟਾਲੇਸ਼ਨ ਸਹਾਇਤਾ ਅਤੇ ਸਮੱਸਿਆ ਦਾ ਹੱਲ
ਇੰਸਟਾਲੇਸ਼ਨ ਪ੍ਰਕਿਰਿਆ ਇੰਸਟਾਲਰ ਫਾਈਲ ਨੂੰ ਡਾਊਨਲੋਡ ਕਰਕੇ ਸ਼ੁਰੂ ਹੁੰਦੀ ਹੈ।
CAPP ਦੀ ਸਥਾਪਨਾ ਵਾਸਤੇ ਲੋੜਾਂ ਨੂੰ ਨੋਟ ਕਰੋ:
- ਉਪਭੋਗਤਾ ਕੋਲ CAP ਨੂੰ ਇੰਸਟਾਲ ਕਰਨ ਵਾਲੇ ਕੰਪਿਊਟਰ 'ਤੇ ਪ੍ਰਸ਼ਾਸਕ ਇਜਾਜ਼ਤ ਅਧਿਕਾਰ ਹੋਣੇ ਚਾਹੀਦੇ ਹਨ।
- ਕੰਪਿਊਟਰ ਨੂੰ ਸਿਸਟਮ ਅਤੇ ਹਾਰਡਵੇਅਰ ਦੀਆਂ ਸਾਰੀਆਂ ਲੋੜਾਂ PhotoRobot ਪੂਰਾ ਕਰਨਾ ਲਾਜ਼ਮੀ ਹੈ।
- ਕੰਪਿਊਟਰ ਲਾਜ਼ਮੀ ਤੌਰ 'ਤੇ ਨਵੀਨਤਮ ਅਪਡੇਟਾਂ ਨਾਲ ਇੱਕ ਸਮਰਥਿਤ ਓਪਰੇਟਿੰਗ ਸਿਸਟਮ ਚਲਾ ਰਿਹਾ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ।
ਮਹੱਤਵਪੂਰਨ: ਇਹ ਵੀ ਨੋਟ ਕਰੋ ਕਿ ਸੀਏਪੀਪੀ ਵਿੱਚ ਨਾ ਸਿਰਫ ਰੋਬੋਟਿਕ ਕੰਟਰੋਲ ਫੰਕਸ਼ਨ ਹੁੰਦੇ ਹਨ ਬਲਕਿ ਕੈਮਰੇ, ਲਾਈਟਾਂ ਅਤੇ ਹੋਰ ਪੈਰੀਫੇਰਲ ਲਈ ਡਰਾਈਵਰ ਵੀ ਹੁੰਦੇ ਹਨ. ਨਤੀਜੇ ਵਜੋਂ, ਅਕਸਰ ਨਵੀਨਤਮ ਮੈਕ ਓਐਸ ਸੰਸਕਰਣ ਤੁਰੰਤ ਸਮਰਥਿਤ ਨਹੀਂ ਹੁੰਦਾ. ਹਾਲਾਂਕਿ, ਜੇ ਅਜਿਹਾ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਇਹ ਸਿਰਫ ਅਸਥਾਈ ਹੈ ਅਤੇ ਜਦੋਂ ਤੱਕ ਸਾਰੇ ਸੰਬੰਧਿਤ ਵਿਕਰੇਤਾ ਅਨੁਕੂਲ ਲਾਇਬ੍ਰੇਰੀਆਂ ਜਾਰੀ ਨਹੀਂ ਕਰਦੇ.
ਹਾਲਾਂਕਿ ਇਹ ਅਸੁਵਿਧਾਜਨਕ ਹੋ ਸਕਦਾ ਹੈ, ਇਹ ਸੀਏਪੀਪੀ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ ਅਨੁਕੂਲਤਾ ਦੇ ਮੁੱਦਿਆਂ ਨਾਲੋਂ ਬਹੁਤ ਘੱਟ ਅਸੁਵਿਧਾਜਨਕ ਹੈ. ਸਮੇਂ ਤੋਂ ਪਹਿਲਾਂ ਅਪਗ੍ਰੇਡ ਤੋਂ ਬਚਣ ਨਾਲੋਂ ਡਾਊਨਗ੍ਰੇਡਿੰਗ ਵੀ ਵਧੇਰੇ ਗੁੰਝਲਦਾਰ ਹੈ।
ਓਐਸ ਅਤੇ ਸਿਸਟਮ ਲੋੜਾਂ ਨੂੰ ਪੂਰਾ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਇੰਸਟਾਲੇਸ਼ਨ ਫਿਰ ਇੰਸਟਾਲਰ ਵਿਜ਼ਾਰਡ ਰਾਹੀਂ ਅੱਗੇ ਵਧਦੀ ਹੈ. PhotoRobot ਖਾਤੇ ਵਿੱਚ ਲੌਗਇਨ ਕਰੋ, ਅਤੇ ਫਿਰ ਹੇਠਾਂ ਦਿੱਤੇ ਕਦਮਾਂ ਦੀ ਪਾਲਣਾ ਕਰਕੇ ਸੈਟਅਪ ਨਾਲ ਅੱਗੇ ਵਧੋ।
ਸੈੱਟਅੱਪ
ਉਪਭੋਗਤਾ ਸਹਿਮਤੀ ਪੁਸ਼ਟੀ
CAPP ਨੂੰ ਡਾਊਨਲੋਡ ਕਰਦੇ ਸਮੇਂ, ਇੱਕ ਨਵੇਂ ਉਪਭੋਗਤਾ ਖਾਤੇ ਨੂੰ ਕਿਰਿਆਸ਼ੀਲ ਕਰਨ ਲਈ ਅੰਤ-ਉਪਭੋਗਤਾ ਲਾਇਸੈਂਸ ਇਕਰਾਰਨਾਮੇ (EULA) ਅਤੇ ਹੋਰ ਸਬੰਧਿਤ ਦਸਤਾਵੇਜ਼ਾਂ ਦੀ ਉਪਭੋਗਤਾ ਪੁਸ਼ਟੀ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।
ਖਾਤਾ ਕਿਰਿਆਸ਼ੀਲ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਖਾਤਾ ਪ੍ਰੋਫਾਈਲ ਸੈਟਿੰਗਾਂ ਵਿੱਚ CAPP ਦੇ ਕਲਾਉਡ ਸੰਸਕਰਣ ਰਾਹੀਂ ਆਪਣੀ ਜਮ੍ਹਾਂ ਕੀਤੀ ਸਹਿਮਤੀ ਜਾਣਕਾਰੀ ਦੀ ਸਮੀਖਿਆ ਕਰਨਾ ਸੰਭਵ ਹੈ।
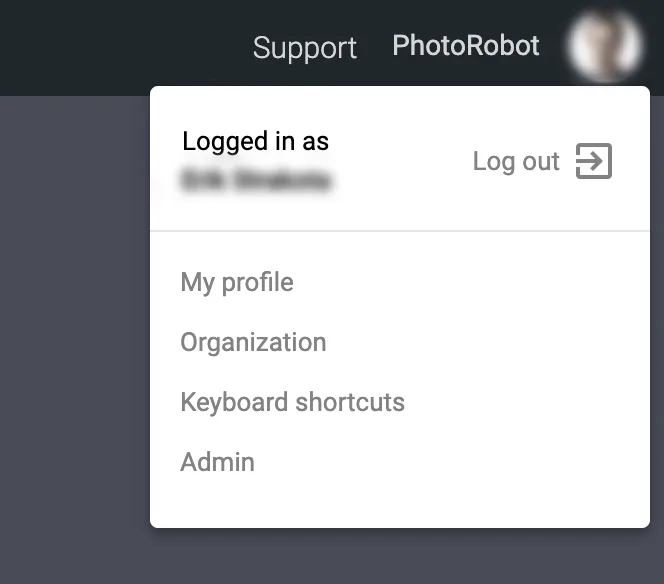
ਆਪਣੀ ਸਹਿਮਤੀ ਜਾਣਕਾਰੀ ਦੀ ਜਾਂਚ ਕਰਨ ਲਈ, CAPP ਦਾ ਕਲਾਉਡ ਸੰਸਕਰਣ ਖੋਲ੍ਹੋ, ਅਤੇ ਇੰਟਰਫੇਸ ਦੇ ਉੱਪਰਲੇ-ਸੱਜੇ ਕੋਨੇ ਵਿੱਚ ਉਪਭੋਗਤਾ ਖਾਤੇ ਦੇ ਆਈਕਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ। ਅੱਗੇ, ਮੀਨੂ ਵਿਕਲਪਾਂ ਵਿੱਚੋਂ ਮੇਰੀ ਪ੍ਰੋਫਾਈਲ ਚੁਣੋ।

ਪ੍ਰੋਫਾਈਲ ਮੇਨੂ ਪ੍ਰੋਫਾਈਲ ਫੋਟੋ, ਆਮ ਉਪਭੋਗਤਾ ਜਾਣਕਾਰੀ (ਨਾਮ, ਫ਼ੋਨ, ਕੰਪਨੀ), ਪਾਸਵਰਡ ਸੈਟਿੰਗਾਂ ਅਤੇ ਸਹਿਮਤੀ ਜਾਣਕਾਰੀ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰੇਗਾ। ਸਹਿਮਤੀ ਜਾਣਕਾਰੀ ਵਿੱਚ ਇਹ ਸ਼ਾਮਲ ਹਨ:
- ਕੰਪਿਊਟਰ ਹੋਸਟਨਾਮ
- ਮਿਤੀ 'ਤੇ ਸਹਿਮਤ ਹੋਏ
- PhotoRobot ਇੰਟਰਨੈਸ਼ਨਲ ਪ੍ਰੋਗਰਾਮ ਲਾਇਸੈਂਸ ਇਕਰਾਰਨਾਮਾ
- ਨਿੱਜੀ ਡੇਟਾ ਪ੍ਰੋਸੈਸਿੰਗ ਲਈ ਸਹਿਮਤੀ
- ਨਿੱਜੀ ਡੇਟਾ ਪ੍ਰੋਸੈਸਿੰਗ ਬਾਰੇ ਜਾਣਕਾਰੀ
ਅਨੁਕੂਲ ਕੈਮਰੇ
ਮਹੱਤਵਪੂਰਨ: ਇਹ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਕਿ CAPP ਕੈਮਰੇ ਨਾਲ ਸਹੀ ਢੰਗ ਨਾਲ ਸੰਚਾਰ ਕਰਦਾ ਹੈ, ਕਿਰਪਾ ਕਰਕੇ ਕੈਮਰੇ ਨਾਲ ਕਨੈਕਟ ਹੋਣ ਵਾਲੇ ਹੋਰ ਸਾਰੇ ਪ੍ਰੋਗਰਾਮਾਂ ਨੂੰ ਬੰਦ ਕਰੋ। ਨਾਲ ਹੀ, PhotoRobot ਅਨੁਕੂਲ ਕੈਮਰਾ ਮਾਡਲਾਂ ਦੀ ਸੂਚੀ ਵਿੱਚੋਂ ਇੱਕ ਅਨੁਕੂਲ ਕੈਮਰੇ ਦੀ ਵਰਤੋਂ ਕਰਨਾ ਯਕੀਨੀ ਬਣਾਓ.
ਨੋਟ: PhotoRobot Controls App 2.5.4 ਦੇ ਰਿਲੀਜ਼ ਹੋਣ ਤੋਂ, ਕਿਸੇ ਵੀ ਕੈਮਰੇ ਨੂੰ ਹੁਣ ਤੀਜੀ-ਧਿਰ ਕੈਮਰਾ ਏਕੀਕਰਣ ਰਾਹੀਂ ਸਮਰਥਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। ਹਾਲਾਂਕਿ, ਸਵੈਚਾਲਿਤ ਫੋਟੋਗ੍ਰਾਫੀ ਲਈ, ਨਵੀਨਤਮ ਮਿਰਰਲੈੱਸ ਕੈਨਨ ਕੈਮਰਾ ਮਾਡਲ ਸਭ ਤੋਂ ਭਰੋਸੇਮੰਦ ਅਤੇ ਕੁਸ਼ਲ ਹਨ।
ਹਾਲਾਂਕਿ ਵਾਈ-ਫਾਈ ਜਾਂ ਕੇਬਲ ਕਨੈਕਸ਼ਨ 'ਤੇ ਸੁਝਾਏ ਗਏ ਹੈਂਡਹੈਲਡ ਕੈਮਰਿਆਂ PhotoRobot ਵਰਤੋਂ ਕਰਨਾ ਸੰਭਵ ਹੈ, ਪਰ ਅਜਿਹਾ ਕਰਨ ਨਾਲ ਸਮੱਸਿਆਵਾਂ ਪੈਦਾ ਹੋ ਸਕਦੀਆਂ ਹਨ।
- ਅਕਸਰ Wi-Fi ਕਨੈਕਸ਼ਨ ਹੋ ਸਕਦੇ ਹਨ (ਮੁੱਖ ਤੌਰ 'ਤੇ ਟਾਈਮਆਊਟ ਦੇ ਕਾਰਨ)। ਇਨ੍ਹਾਂ ਨੂੰ ਸਿਸਟਮ ਨਾਲ ਸਮਾਂ ਲੈਣ ਵਾਲੇ ਪੁਨਰ-ਕਨੈਕਸ਼ਨਾਂ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।
- ਜੇ ਕੇਬਲ ਕਨੈਕਸ਼ਨ ਰਾਹੀਂ ਹੈਂਡਹੈਲਡ ਕੈਮਰੇ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਕੇਬਲ ਦੀ ਲੰਬਾਈ ਦੀ ਪੇਚੀਦਗੀ ਹੁੰਦੀ ਹੈ, ਅਤੇ ਕਨੈਕਸ਼ਨਾਂ ਲਈ ਜੋਖਮ ਹੁੰਦਾ ਹੈ.
PhotoRobot Touch ਐਪ ਰਾਹੀਂ iPhone ਕਨੈਕਸ਼ਨ ਲਈ, ਨੋਟ ਕਰੋ ਕਿ ਇਹਨਾਂ ਵਿੱਚੋਂ ਕੋਈ ਵੀ ਸਮੱਸਿਆ ਨਹੀਂ ਆਉਂਦੀ। iPhone ਲਗਾਤਾਰ ਰੋਸ਼ਨੀ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ ਇੱਕ ਸੈੱਟਅੱਪ ਵਿੱਚ ਹੈਂਡਹੈਲਡ ਫੋਟੋਗ੍ਰਾਫੀ ਦੇ ਸਮਰੱਥ ਹੋਵੇਗਾ। ਹਾਲਾਂਕਿ, ਜੇਕਰ ਫਲੈਸ਼ ਫੋਟੋਗ੍ਰਾਫੀ ਜ਼ਰੂਰੀ ਹੈ, ਤਾਂ ਅਨੁਕੂਲ ਹੈਂਡਹੈਲਡ ਕੈਮਰੇ ਸਿਫ਼ਾਰਿਸ਼ ਕੀਤੇ ਮਿਰਰਲੈੱਸ ਕੈਮਰਿਆਂ ਦੇ ਬਦਲ ਵਜੋਂ ਕੰਮ ਕਰ ਸਕਦੇ ਹਨ। ਬੱਸ Wi-Fi ਅਤੇ ਕੇਬਲ ਵਾਲੇ ਹੈਂਡਹੈਲਡ ਮਾਡਲਾਂ ਨਾਲ ਪੈਦਾ ਹੋਣ ਵਾਲੀਆਂ ਸਮੱਸਿਆਵਾਂ ਨੂੰ ਧਿਆਨ ਵਿੱਚ ਰੱਖੋ।
ਅਨੁਕੂਲ ਲਾਈਟਾਂ
CAPP ਨੂੰ ਰੋਸ਼ਨੀ ਨਾਲ ਸੰਚਾਰ ਕਰਨ ਲਈ, ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਤੁਸੀਂ ਵਰਤੋਂ ਕਰੋ PhotoRobot ਅਨੁਕੂਲ ਸਟੂਡੀਓ ਲਾਈਟਾਂ। ਇਹਨਾਂ ਵਿੱਚ ਦੋ ਕਿਸਮ ਦੀਆਂ ਲਾਈਟਾਂ ਸ਼ਾਮਲ ਹਨ: FOMEI ਅਤੇ Broncolor ਤੋਂ ਸਟ੍ਰੋਬ ਲਾਈਟਾਂ, ਅਤੇ DMX ਸਹਾਇਤਾ ਵਾਲੀਆਂ ਕਿਸੇ ਵੀ ਕਿਸਮ ਦੀਆਂ LED ਲਾਈਟਾਂ।
ਰਿਮੋਟ ਸਪੋਰਟ ਸੈੱਟਅੱਪ
PhotoRobot Controls ਨੂੰ ਸਥਾਪਤ ਕਰਨ ਤੋਂ ਤੁਰੰਤ ਬਾਅਦ, ਇਹ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ ਕਿ ਉਪਭੋਗਤਾ Splashtop SOS (EU-ਖੇਤਰ) ਐਪ ਨੂੰ ਡਾਊਨਲੋਡ ਅਤੇ ਸਥਾਪਤ ਕਰੇ। Splashtop SOS (EU) PhotoRobot ਤਕਨੀਸ਼ੀਅਨਾਂ ਨੂੰ ਗਾਹਕ ਦੇ ਕੰਪਿਊਟਰ ਤੱਕ ਪਹੁੰਚ ਕਰਨ ਅਤੇ ਤਕਨੀਕੀ ਸਹਾਇਤਾ ਪ੍ਰਦਾਨ ਕਰਨ ਦੀ ਇਜਾਜ਼ਤ ਦਿੰਦਾ ਹੈ ਜਦੋਂ ਉਪਭੋਗਤਾ ਕਿਸੇ ਖਾਸ CASE ਲਈ ਇਜਾਜ਼ਤ ਦਿੰਦਾ ਹੈ।
PhotoRobot Controls ਦੇ ਨਾਲ ਹੀ Splashtop SOS ਨੂੰ ਡਾਊਨਲੋਡ ਕਰਨ ਨਾਲ ਰਿਮੋਟ ਤਕਨੀਕੀ ਸਹਾਇਤਾ ਬੇਨਤੀਆਂ ਲਈ ਕਿਸੇ ਵੀ ਦੇਰੀ ਤੋਂ ਬਚਣ ਵਿੱਚ ਮਦਦ ਮਿਲੇਗੀ। ਉਦਾਹਰਨ ਲਈ, ਜਦੋਂ ਕਿਸੇ ਉਪਭੋਗਤਾ ਕੋਲ ਐਪਲੀਕੇਸ਼ਨ ਨੂੰ ਸਥਾਪਿਤ ਕਰਨ ਲਈ ਲੋੜੀਂਦੇ ਅਧਿਕਾਰ ਨਹੀਂ ਹੁੰਦੇ ਹਨ। Splashtop ਨੂੰ ਸਥਾਪਿਤ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਸਾਡੇ ਤਕਨੀਸ਼ੀਅਨ ਤਕਨੀਕੀ ਸਹਾਇਤਾ ਬੇਨਤੀ ਵਾਲੇ ਕੰਪਿਊਟਰ ਤੱਕ ਪਹੁੰਚ ਕਰਨ ਲਈ ਤੁਰੰਤ Splashtop Business ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੇ ਯੋਗ ਹੋ ਜਾਂਦੇ ਹਨ।
ਹਾਲਾਂਕਿ, ਧਿਆਨ ਰੱਖੋ ਕਿ ਉਪਭੋਗਤਾ ਨੂੰ Splashtop SOS ਐਪ ਦਾ EU-ਖੇਤਰ ਵਾਲਾ ਸੰਸਕਰਣ ਡਾਊਨਲੋਡ ਕਰਨਾ ਚਾਹੀਦਾ ਹੈ। US-ਖੇਤਰ ਵਾਲਾ ਸੰਸਕਰਣ ਐਪ ਸਾਡੇ ਤਕਨੀਸ਼ੀਅਨਾਂ ਨੂੰ ਤੁਹਾਡੇ ਕੰਪਿਊਟਰ ਤੱਕ ਪਹੁੰਚ ਕਰਨ ਦੀ ਇਜਾਜ਼ਤ ਨਹੀਂ ਦਿੰਦਾ ਹੈ।
ਇਸ ਲਈ, ਕਿਰਪਾ ਕਰਕੇ ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਤੁਸੀਂ Splashtop SOS ਨੂੰ ਡਾਊਨਲੋਡ ਕਰਨ ਲਈ ਹੇਠਾਂ ਦਿੱਤੇ EU-ਖੇਤਰ ਲਿੰਕ ਦੀ ਵਰਤੋਂ ਕਰ ਰਹੇ ਹੋ:
ਨੋਟ: PhotoRobot ਸਿਸਟਮਾਂ ਲਈ ਰਿਮੋਟ ਸਹਾਇਤਾ ਸਥਾਪਤ ਕਰਨ ਬਾਰੇ ਹੋਰ ਜਾਣਕਾਰੀ ਲਈ, PhotoRobot ਰਿਮੋਟ ਸਪੋਰਟ ਸੈੱਟਅੱਪ ਵੇਖੋ।
ਇੱਕ ਵਰਕਸਪੇਸ ਬਣਾਇਆ ਜਾ ਰਿਹਾ ਹੈ
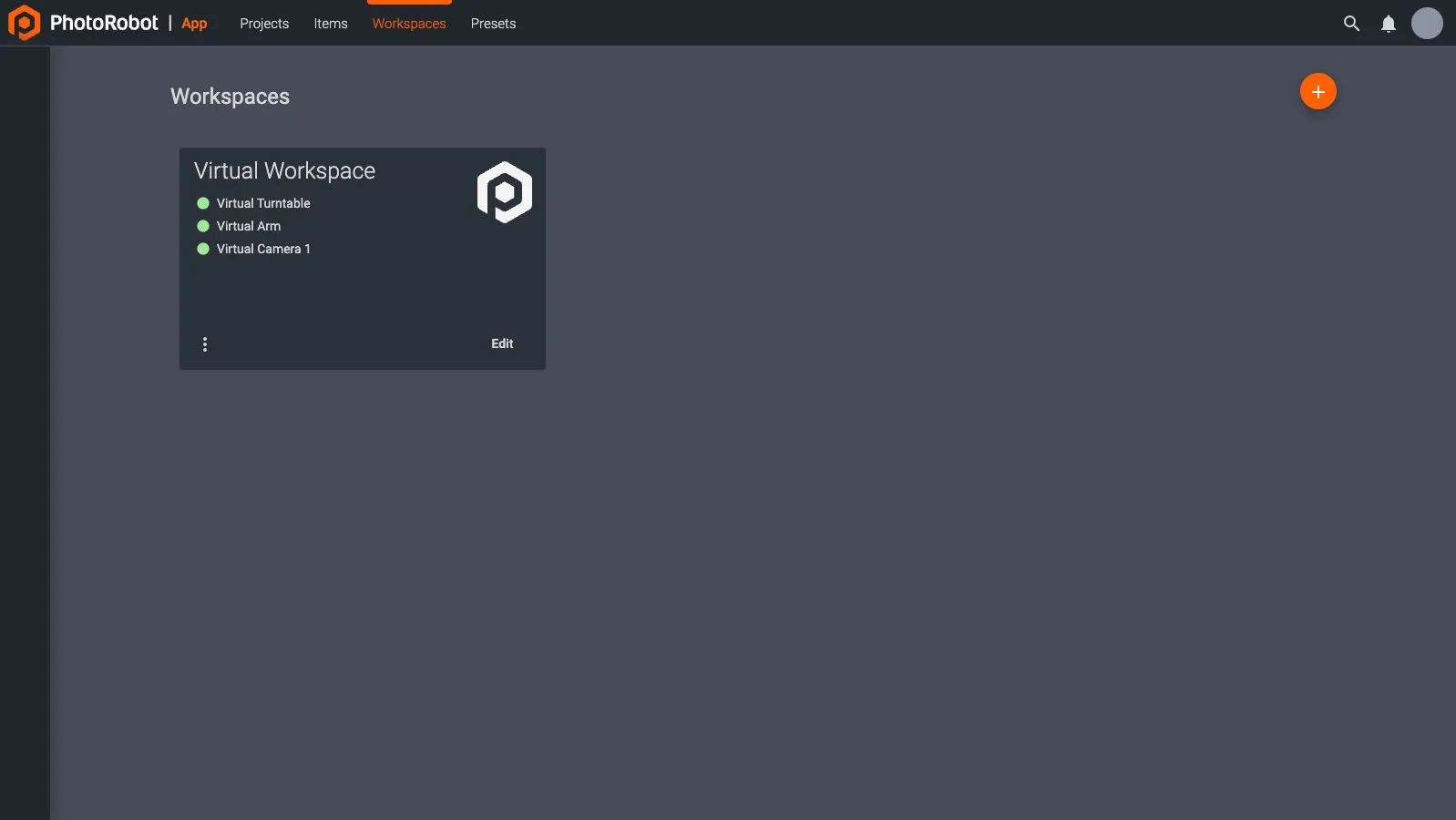
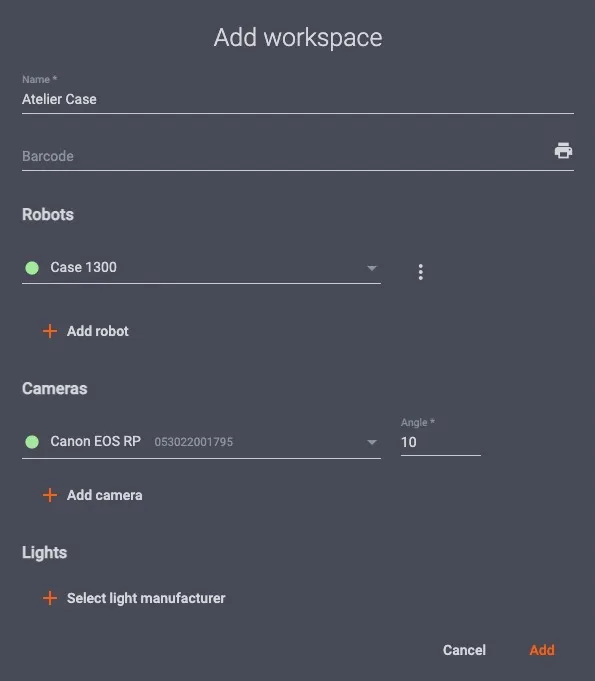
CAPP ਨੂੰ ਖੋਲ੍ਹਣ ਤੋਂ ਬਾਅਦ, ਆਮ ਤੌਰ 'ਤੇ ਉਪਭੋਗਤਾ ਸਭ ਤੋਂ ਪਹਿਲਾਂ ਇੱਕ ਵਰਕਸਪੇਸ ਬਣਾਉਂਦਾ ਹੈ। ਇੱਕ ਵਰਕਸਪੇਸ ਹਾਰਡਵੇਅਰ ਦੀ ਇੱਕ ਸੂਚੀ ਹੈ ਜੋ ਕਿਸੇ ਵਿਸ਼ੇਸ਼ ਫੋਟੋਸ਼ੂਟ ਲਈ ਵਰਤੀ ਜਾ ਰਹੀ ਹੈ। ਇਸ ਵਿੱਚ ਵੱਖ-ਵੱਖ PhotoRobot ਮਾਡਿਊਲ, ਕੈਮਰੇ, ਲਾਈਟਾਂ ਅਤੇ ਹੋਰ ਐਕਸੈਸਰੀਜ਼ ਸ਼ਾਮਲ ਹੋ ਸਕਦੀਆਂ ਹਨ।
ਡੈਮੋ ਉਦੇਸ਼ਾਂ ਲਈ, ਉਪਭੋਗਤਾ ਪਹਿਲਾਂ ਤੋਂ ਪ੍ਰਭਾਸ਼ਿਤ, ਨਮੂਨਾ ਵਰਕਸਪੇਸ ਨਾਲ ਕੰਮ ਕਰ ਸਕਦੇ ਹਨ, ਜਿਸ ਨੂੰ ਵਰਚੁਅਲ ਹਾਰਡਵੇਅਰ ਦੀ ਵਰਤੋਂ ਕਰਨ ਲਈ ਸੰਰਚਿਤ ਕੀਤਾ ਗਿਆ ਹੈ। ਇਸ ਤਰੀਕੇ ਨਾਲ, ਉਪਭੋਗਤਾ ਅਜੇ ਵੀ ਵਰਚੁਅਲ ਰੋਬੋਟਾਂ ਅਤੇ ਕੈਮਰਿਆਂ ਦੀ ਚੋਣ ਕਰਕੇ ਸੀਏਪੀਪੀ ਦੀਆਂ ਵੱਖ-ਵੱਖ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਨਾਲ ਪ੍ਰਯੋਗ ਕਰ ਸਕਦੇ ਹਨ।
ਹਾਰਡਵੇਅਰ ਕੁਨੈਕਟ ਕੀਤਾ ਜਾ ਰਿਹਾ ਹੈ
ਅਸਲ (ਵਰਚੁਅਲ ਦੇ ਉਲਟ) ਹਾਰਡਵੇਅਰ ਦੀ ਵਰਤੋਂ ਸ਼ੁਰੂ ਕਰਨ ਲਈ, ਪਹਿਲਾਂ ਇਹ ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਹਾਰਡਵੇਅਰ ਉਸੇ ਕੰਪਿਊਟਰ ਨੈੱਟਵਰਕ (ਜਾਂ ਉਪ-ਨੈੱਟਵਰਕ) ਨਾਲ ਜੁੜਿਆ ਹੋਇਆ ਹੈ ਜਿਸ ਕੰਪਿਊਟਰ ਦੀ ਵਰਤੋਂ ਤੁਸੀਂ ਆਪਣੇ PhotoRobot ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਨ ਲਈ ਕਰ ਰਹੇ ਹੋ।
ਨੋਟ: PhotoRobot Controls ਸੰਸਕਰਣ 2.5.4 ਦੇ ਅਨੁਸਾਰ, ਤੀਜੀ-ਧਿਰ ਕੈਮਰਾ ਏਕੀਕਰਨ ਰਾਹੀਂ ਕਿਸੇ ਵੀ ਕੈਮਰੇ ਨੂੰ ਹੁਣ ਸਮਰਥਨ ਦਿੱਤਾ ਜਾ ਸਕਦਾ ਹੈ। ਇਸ ਦੌਰਾਨ, ਅਨੁਕੂਲ ਕੈਮਰਿਆਂ ਵਿੱਚ ਕੈਨਨ ਕੈਮਰਾ ਮਾਡਲਾਂ ਦੀ ਇੱਕ ਰੇਂਜ, ਸਾਡੇ ਸਿਫਾਰਸ਼ ਕੀਤੇ Wi-Fi-ਸਮਰੱਥ ਕੈਨਨ ਕੈਮਰੇ, ਅਤੇ PhotoRobot Touch ਐਪ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ iPhone ਕੈਮਰੇ ਵੀ ਸ਼ਾਮਲ ਹਨ।
ਮਹੱਤਵਪੂਰਨ: ROBOTIC ਵਰਕਸਟੇਸ਼ਨ ਦੁਆਰਾ ਸਵੈਚਾਲਿਤ ਫੋਟੋਗ੍ਰਾਫੀ ਲਈ, PhotoRobot ਦੁਆਰਾ ਸਿਫਾਰਸ਼ ਕੀਤੇ ਮਿਰਰਲੈੱਸ Canon ਕੈਮਰਾ ਮਾਡਲ ਸਭ ਤੋਂ ਭਰੋਸੇਮੰਦ ਹਨ। ਜਦੋਂ ਕਿ Wi-Fi ਜਾਂ ਕੇਬਲ ਕਨੈਕਸ਼ਨ ਰਾਹੀਂ ਹੈਂਡਹੈਲਡ ਕੈਮਰਿਆਂ ਲਈ ਸਮਰਥਨ ਹੈ, ਉਹਨਾਂ ਦੀ ਵਰਤੋਂ ਸਮੱਸਿਆਵਾਂ ਪੈਦਾ ਕਰ ਸਕਦੀ ਹੈ। ਇਹਨਾਂ ਵਿੱਚ ਅਕਸਰ Wi-Fi ਡਿਸਕਨੈਕਸ਼ਨ (ਮੁੱਖ ਤੌਰ 'ਤੇ ਸਮਾਂ ਸਮਾਪਤੀ ਕਾਰਨ), ਕੇਬਲ ਦੀ ਲੰਬਾਈ ਨਾਲ ਪੇਚੀਦਗੀਆਂ, ਅਤੇ ਕਨੈਕਸ਼ਨਾਂ ਲਈ ਜੋਖਮ ਸ਼ਾਮਲ ਹਨ।
ਕੈਮਰੇ ਨੂੰ ਕਨੈਕਟ ਕਰਨ ਲਈ, ਇਸ ਨੂੰ ਤਿੰਨ ਤਰੀਕਿਆਂ ਵਿੱਚੋਂ ਕਿਸੇ ਇੱਕ ਤਰੀਕੇ ਨਾਲ ਰੋਬੋਟ ਦੇ ਨਾਲ ਉਸੇ ਸਥਾਨਕ ਕੰਪਿਊਟਰ ਨੈੱਟਵਰਕ ਨਾਲ ਕਨੈਕਟ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ:
- USB ਰਾਹੀਂ ਸਥਾਨਕ ਖੇਤਰ ਨੈੱਟਵਰਕ ਨਾਲ ਸਿੱਧਾ ਕਨੈਕਸ਼ਨ;
- ਵਿਸ਼ੇਸ਼ Wi-Fi ਪ੍ਰੋਟੋਕੋਲ ਰਾਹੀਂ ਸਿਫਾਰਸ਼ ਕੀਤੇ ਹੈਂਡਹੈਲਡ ਕੈਮਰੇ ਦਾ ਕਨੈਕਸ਼ਨ (ਕੈਨਨ ਡਿਵੈਲਪਰ ਪੇਜ 'ਤੇ ਕੈਨਨ ਦੇ ਟੂਲ ਐਪਲੀਕੇਸ਼ਨ ਵਿੱਚ ਪਹੁੰਚਯੋਗ);
- PhotoRobot ਟੱਚ ਐਪਲੀਕੇਸ਼ਨ ਰਾਹੀਂ ਇੱਕ ਜਾਂ ਇੱਕ ਤੋਂ ਵੱਧ ਆਈਫ਼ੋਨਾਂ ਦਾ ਏਕੀਕਰਨ। (PhotoRobot ਵਾਲੇ iPhone ਦੀ ਵਰਤੋਂ ਕਰਨ ਬਾਰੇ ਹਦਾਇਤਾਂ ਵਾਸਤੇ, iPhone Touch ਐਪ ਉਪਭੋਗਤਾ ਮੈਨੂਅਲ ਦੇਖੋ।)
ਹਾਰਡਵੇਅਰ (ਜਾਂ ਕੈਮਰਾ) ਦੇ ਇੱਕ ਟੁਕੜੇ ਨੂੰ ਵਰਕਸਪੇਸ ਨਾਲ ਕਨੈਕਟ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਤੁਸੀਂ ਫਿਰ ਜਾਂਚ ਕਰ ਸਕਦੇ ਹੋ ਕਿ ਇਹ ਔਨਲਾਈਨ ਹੈ ਜਾਂ ਨਹੀਂ (CAPP ਦੁਆਰਾ ਪਛਾਣਿਆ ਗਿਆ ਹੈ)। ਅਜਿਹਾ ਕਰਨ ਲਈ, ਦਿੱਤੇ ਗਏ ਉਪਕਰਣ ਦੇ ਨਾਮ ਦੇ ਖੱਬੇ ਪਾਸੇ ਬਿੰਦੀ ਦੀ ਜਾਂਚ ਕਰੋ। ਜੇਕਰ ਡਿਵਾਈਸ ਪਛਾਣੀ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਇੱਕ ਹਰਾ ਬਿੰਦੂ ਹੋਵੇਗਾ।
ਡਿਵਾਈਸ ਦੇ ਨਾਮ ਦੇ ਅੱਗੇ ਇੱਕ ਸਲੇਟੀ ਬਿੰਦੀ ਇਹ ਸੰਕੇਤ ਦਿੰਦੀ ਹੈ ਕਿ ਹਾਰਡਵੇਅਰ ਨੂੰ ਪਛਾਣਿਆ ਨਹੀਂ ਗਿਆ ਸੀ ਜਾਂ ਚਾਲੂ ਨਹੀਂ ਕੀਤਾ ਗਿਆ ਸੀ। ਜੇਕਰ ਇੱਕ ਲਾਲ ਬਿੰਦੀ ਹੈ, ਤਾਂ ਇੱਕ ਗਲਤੀ ਹੈ, ਜਿਵੇਂ ਕਿ ਉਪਭੋਗਤਾ ਦੁਆਰਾ ਕੈਮਰੇ ਨੂੰ ਮੈਨੂਅਲ ਮੋਡ ਵਿੱਚ ਨਾ ਬਦਲਣਾ। ਗਲਤੀ ਦੇ ਕਾਰਨ ਦੀ ਪਛਾਣ ਕਰਨ ਲਈ, ਗਲਤੀ ਦੇ ਵੇਰਵੇ ਵਾਲੀ ਇੱਕ ਟੂਲਟਿੱਪ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਨ ਲਈ ਮਾਊਸ ਨੂੰ ਲਾਲ ਬਿੰਦੀ ਉੱਤੇ ਹੋਵਰ ਕਰੋ।
ਹਾਰਡਵੇਅਰ ਨੂੰ ਕਨੈਕਟ ਕਰਕੇ ਇੱਕ ਵਰਕਸਪੇਸ ਸਥਾਪਤ ਕਰਨ ਲਈ ਪੂਰੀ ਕਦਮ-ਦਰ-ਕਦਮ ਜਾਣਕਾਰੀ ਲਈ, ਵੇਖੋ ਇੱਕ PhotoRobot ਵਰਕਸਪੇਸ ਸਥਾਪਤ ਕਰਨਾ।
ਜੇਕਰ ਸਮੱਸਿਆਵਾਂ ਆ ਰਹੀਆਂ ਹਨ, ਤਾਂ ਕਿਰਪਾ ਕਰਕੇ PhotoRobot ਸਮੱਸਿਆ ਨਿਵਾਰਨ ਨੂੰ ਆਮ ਸਮੱਸਿਆਵਾਂ ਅਤੇ ਉਹਨਾਂ ਦੇ ਹੱਲਾਂ ਲਈ ਵੇਖੋ।
ਰੋਬੋਟ ਬਾਂਹ ਉਚਾਈ ਸੈੱਟਅਪ
ਜੇ ਵਰਕਸਪੇਸ ਵਿੱਚ ਰੋਬੋਟ ਆਰਮ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਨੋਟ ਕਰੋ ਕਿ ਸੰਭਵ ਤੌਰ 'ਤੇ ਵਾਧੂ ਸੈਟਅਪ ਦੀ ਲੋੜ ਪਵੇਗੀ। ਇਹ ਇਸ ਲਈ ਹੈ ਕਿਉਂਕਿ ਰੋਬੋਟਿਕ ਬਾਂਹ ਇੱਕ ਸੁਤੰਤਰ ਮਸ਼ੀਨ ਹੈ, ਅਤੇ ਸੀਏਪੀਪੀ ਦੁਆਰਾ ਇਸ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਨ ਦੇ ਕਾਰਜਾਂ ਵਿੱਚੋਂ ਇੱਕ ਇਹ ਹੈ ਕਿ ਉਚਾਈ ਅੰਦੋਲਨ ਘੁੰਮਣ ਧੁਰੇ ਨੂੰ ਫੋਟੋ ਖਿੱਚਣ ਵਾਲੀ ਵਸਤੂ ਦੀ ਉਚਾਈ ਦੇ ਮੱਧ-ਬਿੰਦੂ ਨਾਲ ਜੋੜਦਾ ਹੈ.
ਰੋਬੋਟ ਬਾਂਹ ਦੀ ਘੁੰਮਣ ਵਾਲੀ ਧੁਰੀ ਦੀ ਉਚਾਈ ਵਰਕਸਟੇਸ਼ਨ ਮਸ਼ੀਨ ਦੀ ਕਿਸਮ ਦੁਆਰਾ ਨਿਰਧਾਰਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਅਤੇ ਉਸੇ ਸਮੇਂ ਲੈਵਲਿੰਗ ਪੈਰਾਂ ਦੇ ਅਨੁਕੂਲਨ ਦੁਆਰਾ ਨਿਰਧਾਰਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਜੋ ਫਰਸ਼ ਦੀ ਕਿਸੇ ਵੀ ਅਸਮਾਨਤਾ ਦੀ ਭਰਪਾਈ ਕਰਦੀ ਹੈ. ਜੇ ਸਭ ਕੁਝ ਸਹੀ ਢੰਗ ਨਾਲ ਸਥਾਪਤ ਕੀਤਾ ਗਿਆ ਹੈ, ਤਾਂ ਮਸ਼ੀਨ ਪੱਧਰੀ ਹੈ, ਅਤੇ ਰੋਟੇਸ਼ਨ ਸੈਂਟਰ ਫਰਸ਼ ਤੋਂ ਇੱਕ ਖਾਸ ਉਚਾਈ 'ਤੇ ਹੈ. ਹਾਲਾਂਕਿ, ਕੁੱਲ ਉਚਾਈ ਟਰਨਟੇਬਲ ਸਤਹ ਦੀ ਉਚਾਈ 'ਤੇ ਵੀ ਨਿਰਭਰ ਕਰੇਗੀ, ਜੋ ਵੱਖ-ਵੱਖ ਰੋਬੋਟਾਂ ਵਿਚਕਾਰ ਵੱਖਰੀ ਹੁੰਦੀ ਹੈ. ਇਸਦਾ ਮਤਲਬ ਇਹ ਹੈ ਕਿ ਉਚਾਈ ਦੇ ਹਵਾਲੇ ਵਿੱਚ ਕੋਈ ਅੰਤਰ ਹੋ ਸਕਦਾ ਹੈ, ਕਿਉਂਕਿ ਰੋਬੋਟ ਬਾਂਹ ਦੇ ਕਾਲਮ ਦੇ ਹੇਠਾਂ ਇੱਕ ਉਚਾਈ ਅਡਾਪਟਰ ਹੁੰਦਾ ਹੈ ਤਾਂ ਜੋ ਇਹ ਲਗਭਗ ਇਕਸਾਰ ਹੋ ਜਾਵੇ.
ਸੰਪੂਰਨ ਸੰਗਠਨ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ, ਫਿਰ ਬਾਂਹ ਅਤੇ ਟਰਨਟੇਬਲ ਦੇ ਵਿਚਕਾਰ ਉਚਾਈ ਦੇ ਅੰਤਰ ਨੂੰ ਸੀਏਪੀਪੀ ਵਿੱਚ ਦਾਖਲ ਕਰਨਾ ਜ਼ਰੂਰੀ ਹੋ ਜਾਂਦਾ ਹੈ. ਉਚਾਈ ਦਾ ਅੰਤਰ ਰੋਬੋਟਿਕ ਬਾਂਹ ਦੇ ਘੁੰਮਣ ਧੁਰੇ ਅਤੇ ਉਸ ਉਚਾਈ ਦੇ ਵਿਚਕਾਰ ਸਹੀ ਦੂਰੀ ਨੂੰ ਮਾਪਦਾ ਹੈ ਜਿਸ 'ਤੇ ਟਰਨਟੇਬਲ ਸਤਹ ਸਥਿਤ ਹੈ (ਇਸ ਦੇ ਉੱਪਰ ਰੱਖੇ ਗਏ ਕਿਸੇ ਵੀ ਵਾਧੂ ਬੋਰਡ ਸਮੇਤ). ਇਹ ਸਹੀ ਆਯਾਮ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ ਜਿਸ ਤੋਂ ਸਿਸਟਮ ਵਸਤੂ ਦੀ ਉਚਾਈ ਦੇ ਅੱਧੇ ਦੀ ਗਣਨਾ ਕਰਦਾ ਹੈ, ਅਤੇ ਉਹ ਸਥਿਤੀ ਜਿੱਥੇ ਬਾਂਹ ਨੂੰ ਹਿੱਲਣਾ ਚਾਹੀਦਾ ਹੈ. ਇਹ ਇਹ ਵੀ ਯਕੀਨੀ ਬਣਾਉਂਦਾ ਹੈ ਕਿ ਸਿਸਟਮ ਆਪਣੇ ਆਪ ਅਤੇ ਸਹੀ ਢੰਗ ਨਾਲ ਕੰਮ ਕਰਨ ਲਈ ਸੈੱਟ ਕੀਤਾ ਗਿਆ ਹੈ।
ਇਹ ਵੀ ਨੋਟ ਕਰੋ: ਸਿਸਟਮ ਉਹਨਾਂ ਮੁੱਲਾਂ ਨੂੰ ਰੱਦ ਕਰਨ ਲਈ ਸੈੱਟ ਕੀਤਾ ਗਿਆ ਹੈ ਜੋ ਕਿਸੇ ਦਿੱਤੇ ਗਏ ਸੈਟਅਪ ਲਈ ਜਾਇਜ਼ ਸੀਮਾ ਤੋਂ ਬਾਹਰ ਆਉਂਦੇ ਹਨ।
ਰੋਬੋਟ ARM ਐਲੀਵੇਟਰ ਨੂੰ ਜ਼ੀਰੋ ਲੈਵਲ 'ਤੇ ਸੈੱਟ ਕਰੋ
Robot Arm ਐਲੀਵੇਟਰ ਨੂੰ ਜ਼ੀਰੋ ਪੱਧਰ 'ਤੇ ਸੈੱਟ ਕਰਨ ਲਈ, ਪਹਿਲਾਂ CAPP ਦਾ ਸਥਾਨਕ ਸੰਸਕਰਣ ਖੋਲ੍ਹੋ, ਅਤੇ ਵਰਕਸਪੇਸ ਸੈਟਿੰਗਾਂ ਨੂੰ ਦੋ ਤਰੀਕਿਆਂ ਵਿੱਚੋਂ ਇੱਕ ਵਿੱਚ ਐਕਸੈਸ ਕਰੋ:
1. CAPP ਦਾ ਸਥਾਨਕ ਸੰਸਕਰਣ ਖੋਲ੍ਹੋ, ਇੰਟਰਫੇਸ ਦੇ ਸਿਖਰ 'ਤੇ ਸੈਟਿੰਗਾਂ 'ਤੇ ਕਲਿੱਕ ਕਰੋ, ਅਤੇ ਖੱਬੇ ਹੱਥ ਦੇ ਮੀਨੂ ਵਿਕਲਪਾਂ ਵਿੱਚੋਂ ਵਰਕਸਪੇਸ ਚੁਣੋ। ਇਸ ਮੀਨੂ ਵਿੱਚ, ਕਾਰਜ ਸਥਾਨ ਨੂੰ ਕਾਰਜਸ਼ੀਲ ਲੱਭੋ, ਅਤੇ ਵਰਕਸਪੇਸ ਸੈਟਿੰਗਾਂ ਨੂੰ ਸੰਪਾਦਿਤ ਕਰਨ ਲਈ ਵਰਕਸਪੇਸ ਸਿਰਲੇਖ ਦੇ ਅੱਗੇ ਸੰਪਾਦਨ ਆਈਕਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ:
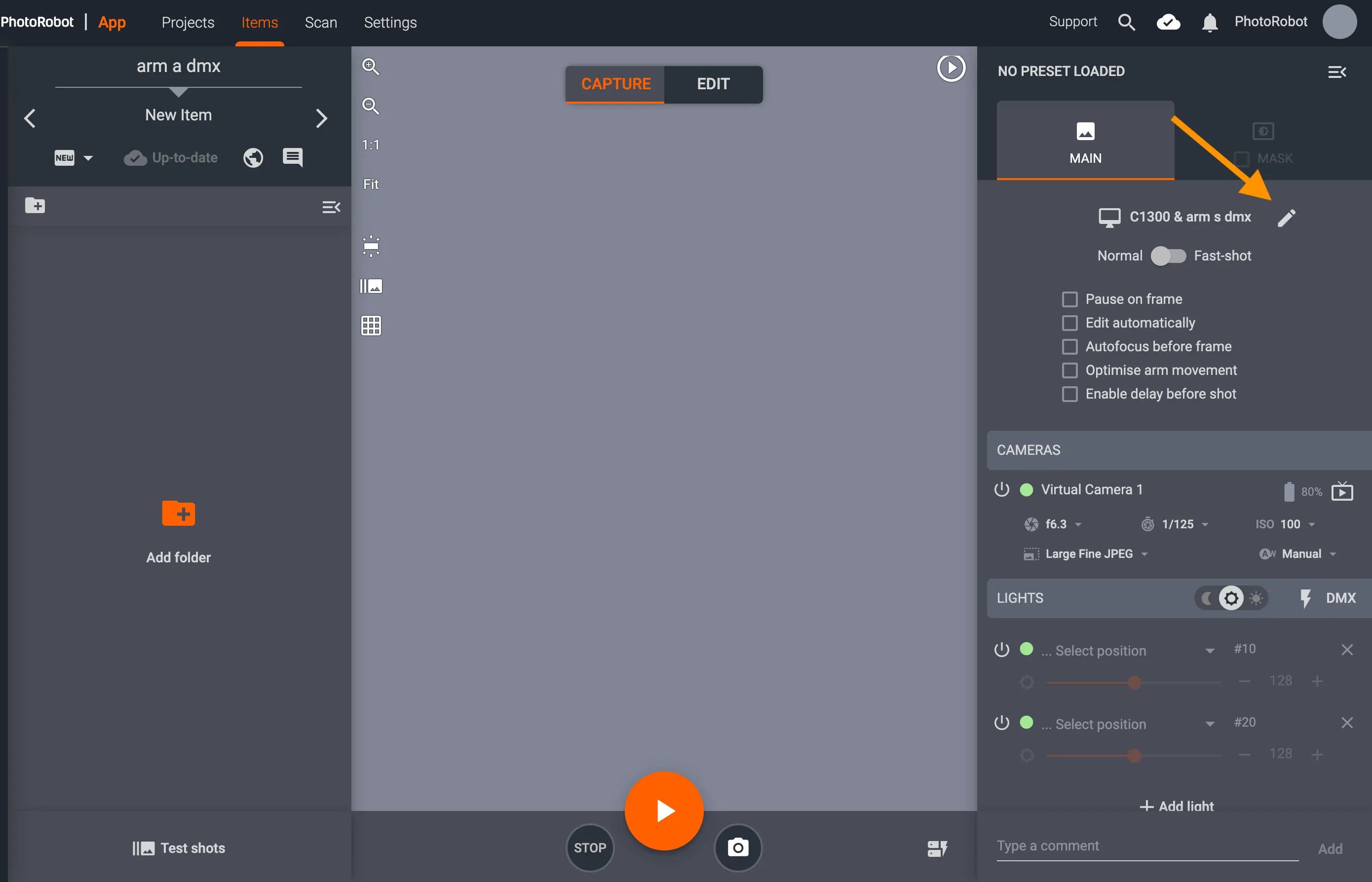
2. ਵਿਕਲਪਕ ਤੌਰ 'ਤੇ, CAPP ਦੇ ਸਥਾਨਕ ਸੰਸਕਰਣ ਵਿੱਚ ਕੈਪਚਰ ਮੋਡ ਵਿੱਚ ਇੱਕ ਆਈਟਮ ਖੋਲ੍ਹ ਕੇ ਅਤੇ ਫਿਰ ਇੰਟਰਫੇਸ ਦੇ ਸੱਜੇ ਪਾਸੇ ਵਰਕਸਪੇਸ ਸਿਰਲੇਖ ਦੇ ਅੱਗੇ ਸੰਪਾਦਨ ਆਈਕਨ 'ਤੇ ਕਲਿੱਕ ਕਰਕੇ ਵਰਕਸਪੇਸ ਮੇਨੂ ਨੂੰ ਸੰਪਾਦਿਤ ਕਰਨਾ ਸੰਭਵ ਹੈ:
ਕੋਈ ਵੀ ਵਿਧੀ ਵਰਕਸਪੇਸ ਸੈਟਿੰਗਾਂ ਨੂੰ ਸੰਪਾਦਿਤ ਕਰਨ ਲਈ ਖੋਲ੍ਹ ਦੇਵੇਗੀ। ਫਿਰ, ਰੋਬੋਟ ਆਰਮ ਨੂੰ ਕੌਂਫਿਗਰ ਕਰਨ ਲਈ, ਰੋਬੋਟ ਮੀਨੂ ਦੇ ਹੇਠਾਂ ਡਿਵਾਈਸ ਲੱਭੋ, ਅਤੇ ਰੋਬੋਟ ਆਰਮ ਨਾਮ ਦੇ ਅੱਗੇ 3 ਲੰਬੀਆਂ ਬਿੰਦੂਆਂ 'ਤੇ ਕਲਿੱਕ ਕਰੋ.
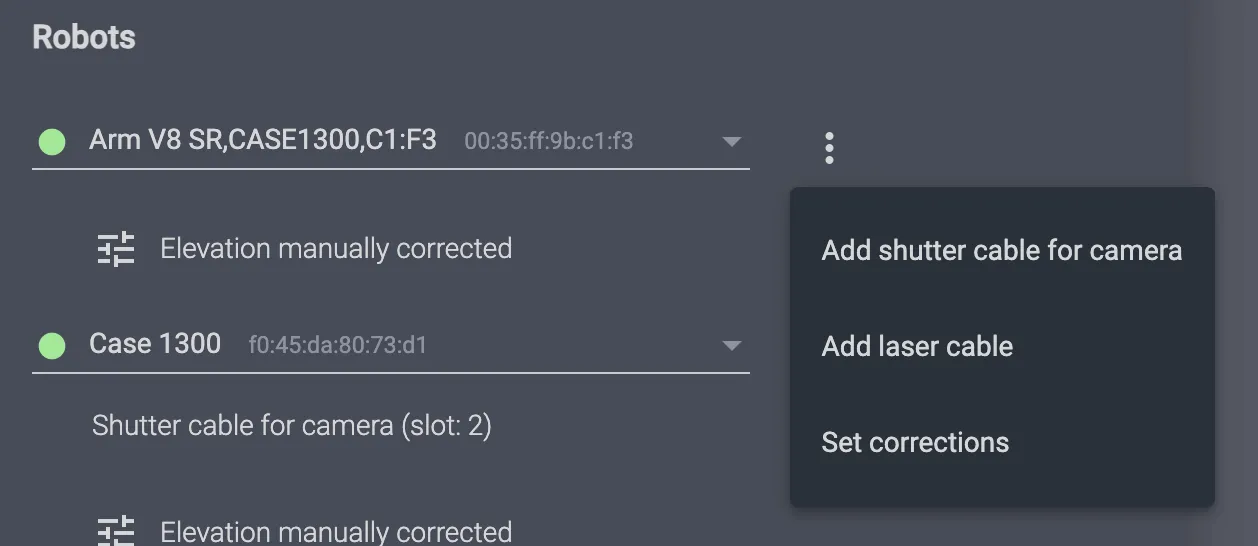
ਅੱਗੇ, ਮੀਨੂ ਵਿਕਲਪ ਦੀ ਚੋਣ ਕਰੋ ਲਿਫਟ ਸੁਧਾਰ ਫੰਕਸ਼ਨ ਸੈੱਟ ਕਰਨ ਲਈ ਸੁਧਾਰ ਸੈੱਟ ਕਰੋ:
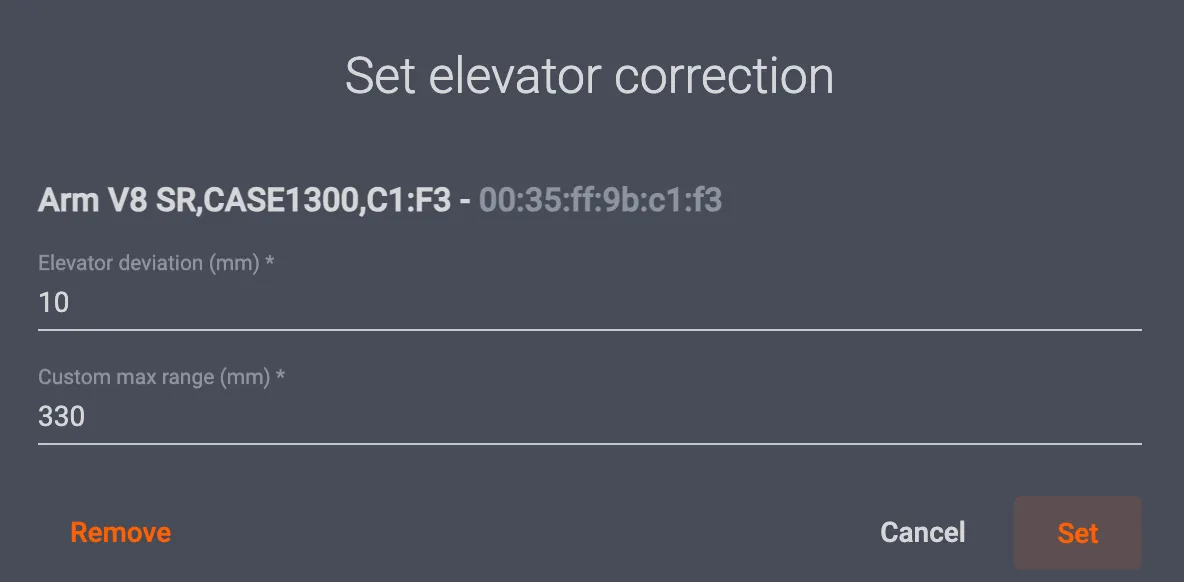
ਸੈੱਟ ਐਲੀਵੇਟਰ ਸੁਧਾਰ ਮੀਨੂ ਵਿੱਚ, ਕੈਮਰੇ ਦੀ ਉਚਾਈ ਨੂੰ ਉਚਿਤ ਜ਼ੀਰੋ ਪੱਧਰ 'ਤੇ ਸੈੱਟ ਕਰਨ ਲਈ ਸਿਖਰਲੇ ਫੀਲਡ ਐਲੀਵੇਟਰ ਡਿਵੀਏਸ਼ਨ (ਮਿਲੀਮੀਟਰ) ਵਿੱਚ ਨੰਬਰ ਨੂੰ ਐਡਜਸਟ ਕਰੋ। ਉਦਾਹਰਨ ਲਈ, ਜੇ ਕੈਮਰਾ ਟੇਬਲ ਤੋਂ 10 ਮਿਲੀਮੀਟਰ ਉੱਪਰ ਕੇਂਦਰ ਤੋਂ ਬਾਹਰ ਹੈ, ਤਾਂ ਕੈਮਰੇ ਨੂੰ ਕੇਂਦਰਿਤ ਕਰਨ ਲਈ ਐਲੀਵੇਟਰ ਵਿचलन ਨੂੰ -10 ਮਿਲੀਮੀਟਰ ਤੱਕ ਸੈੱਟ ਕਰੋ.
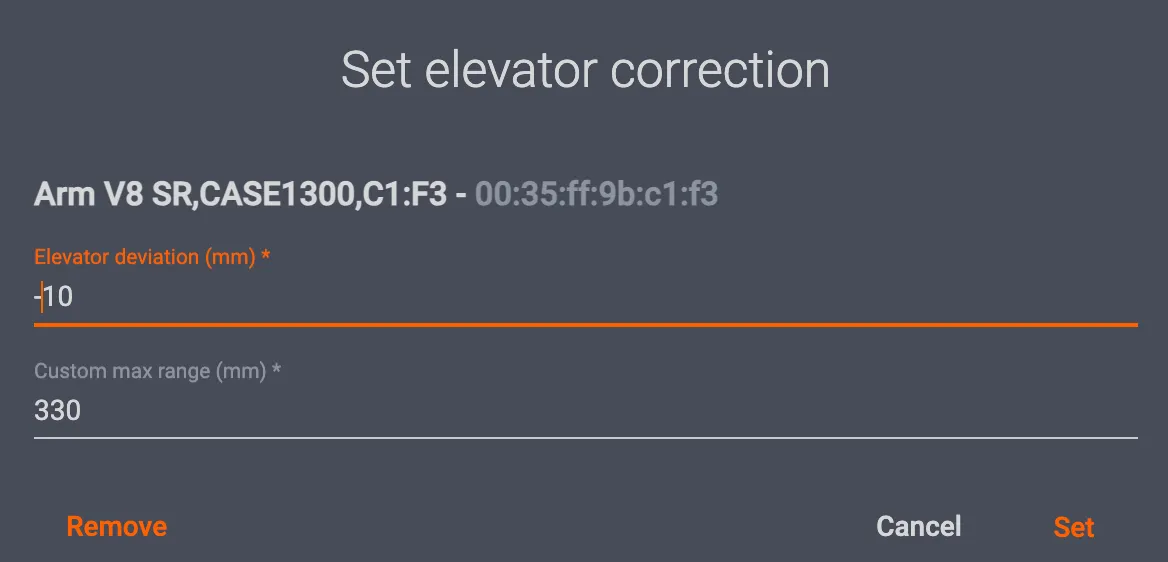
ਜੇ ਕੈਮਰਾ ਟੇਬਲ ਤੋਂ 10 ਮਿਲੀਮੀਟਰ ਹੇਠਾਂ ਕੇਂਦਰ ਤੋਂ ਬਾਹਰ ਹੈ, ਤਾਂ ਲਿਫਟ ਵਿचलन ਨੂੰ +10 ਮਿਲੀਮੀਟਰ 'ਤੇ ਸੈੱਟ ਕਰੋ। ਇਹ ਰੋਬੋਟ ਆਰਮ 'ਤੇ ਮਾਊਂਟੇਡ ਕੈਮਰੇ ਦੀ ਉਚਾਈ ਨੂੰ ਸਾਫਟਵੇਅਰ ਵਿਚ ਉਚਿਤ ਜ਼ੀਰੋ ਪੱਧਰ ਤੱਕ ਸਹੀ ਢੰਗ ਨਾਲ ਜੋੜ ਦੇਵੇਗਾ.
ਨੋਟ: ਲਿਫਟ ਵੱਧ ਤੋਂ ਵੱਧ ੩੩੦ ਮਿਲੀਮੀਟਰ ਤੱਕ ਪਹੁੰਚ ਸਕਦੀ ਹੈ। ਇਸ ਤਰ੍ਹਾਂ, ਜੇ ਜ਼ੀਰੋ ਪੱਧਰ ਨੂੰ +30 ਮਿਲੀਮੀਟਰ ਨਾਲ ਐਡਜਸਟ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਵੱਧ ਤੋਂ ਵੱਧ ਲਿਫਟ ਸਿਰਫ 300 ਮਿਲੀਮੀਟਰ ਤੱਕ ਪਹੁੰਚ ਸਕਦੀ ਹੈ. ਇਸਦਾ ਮਤਲਬ ਹੈ ਕਿ ਸਿਸਟਮ ਸਿਰਫ ਉਨ੍ਹਾਂ ਉਤਪਾਦਾਂ ਨੂੰ ਕੈਪਚਰ ਕਰਨ ਦੇ ਯੋਗ ਹੋਵੇਗਾ ਜੋ ਇਸ ਮਾਰਜਨ ਦੁਆਰਾ ਛੋਟੇ ਹਨ, 30 ਮਿਲੀਮੀਟਰ ਜਾਂ ਇਸ ਤੋਂ ਘੱਟ.
ਫਾਇਲਾਂ - ਪ੍ਰੋਜੈਕਟ, ਆਈਟਮਾਂ ਅਤੇ ਫੋਲਡਰਾਂ ਦਾ ਪਰਬੰਧ
CAPP ਵਿੱਚ, ਚਿੱਤਰਾਂ ਨੂੰ ਪ੍ਰੋਜੈਕਟਾਂ, ਆਈਟਮਾਂ ਅਤੇ ਫੋਲਡਰਾਂ ਵਿੱਚ ਵਿਵਸਥਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
- ਇੱਕ ਪ੍ਰੋਜੈਕਟ ਸਭ ਤੋਂ ਉੱਚੇ ਪੱਧਰ ਦੀ ਡਾਟਾ ਇਕਾਈ ਹੁੰਦੀ ਹੈ। ਆਮ ਤੌਰ 'ਤੇ, ਇੱਕ ਪ੍ਰੋਜੈਕਟ ਵਿੱਚ ਇੱਕ ਸਿੰਗਲ ਫੋਟੋਸ਼ੂਟ ਜਾਂ ਸ਼ਾਇਦ ਇੱਕ ਸਿੰਗਲ ਸ਼ੂਟਿੰਗ ਵਾਲੇ ਦਿਨ/ਹਫਤੇ ਦੀਆਂ ਆਈਟਮਾਂ ਸ਼ਾਮਲ ਹੁੰਦੀਆਂ ਹਨ।
- ਪ੍ਰੋਜੈਕਟਾਂ ਵਿੱਚ ਇੱਕ ਜਾਂ ਇੱਕ ਤੋਂ ਵੱਧ ਆਈਟਮਾਂ ਹੁੰਦੀਆਂ ਹਨ। ਇੱਕ ਸਿੰਗਲ ਆਈਟਮ ਆਮ ਤੌਰ 'ਤੇ ਇੱਕ ਖਾਸ, ਫ਼ੋਟੋਗ੍ਰਾਫ਼ੀ ਕੀਤੀ ਵਸਤੂ ਹੋਵੇਗੀ।
- ਇੱਕ ਆਈਟਮ ਵਿੱਚ ਇੱਕ ਜਾਂ ਵੱਧ ਫੋਲਡਰ ਹੁੰਦੇ ਹਨ। CAPP ਵਿੱਚ, ਤੁਸੀਂ ਵੱਖ-ਵੱਖ ਕਿਸਮਾਂ ਦੇ ਚਿੱਤਰਾਂ ਨੂੰ ਵੱਖ-ਵੱਖ ਰੱਖਣ ਲਈ ਇੱਕ ਆਈਟਮ ਵਿੱਚ ਕਈ ਫੋਲਡਰ ਰੱਖ ਸਕਦੇ ਹੋ। ਇੱਕ ਬਹੁਤ ਹੀ ਆਮ ਉਦਾਹਰਨ ਇਹ ਹੈ ਕਿ 360° ਰੋਟੇਟਿੰਗ ਪ੍ਰੈਜ਼ਨਟੇਸ਼ਨ (ਜਿਸਨੂੰ "ਸਪਿਨ" ਕਹਿੰਦੇ ਹਨ) ਲਈ ਇੱਕ ਫੋਲਡਰ ਹੋਣਾ ਹੈ, ਜਦੋਂ ਕਿ ਸਟਿੱਲ ਚਿੱਤਰਾਂ ("ਸਟਿੱਲ") ਨੂੰ ਸਟੋਰ ਕਰਨ ਲਈ ਦੂਜੇ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਸ਼ੂਟਿੰਗ ਸ਼ੁਰੂ ਕਰਨ ਲਈ, ਤੁਹਾਨੂੰ ਪਹਿਲਾਂ ਇੱਕ ਨਵਾਂ ਪ੍ਰੋਜੈਕਟ ਸ਼ਾਮਲ ਕਰਨਾ ਚਾਹੀਦਾ ਹੈ (ਜਦ ਤੱਕ ਤੁਹਾਡੇ ਕੋਲ ਪਹਿਲਾਂ ਤੋਂ ਕੋਈ ਅਜਿਹਾ ਪ੍ਰੋਜੈਕਟ ਨਹੀਂ ਹੈ ਜਿਸਨੂੰ ਤੁਸੀਂ ਵਰਤਣਾ ਚਾਹੁੰਦੇ ਹੋ), ਅਤੇ ਨਾਲ ਹੀ ਘੱਟੋ ਘੱਟ ਇੱਕ ਆਈਟਮ ਵੀ ਸ਼ਾਮਲ ਕਰੋ।
( ! ) - ਜੇ ਸਮੱਸਿਆਵਾਂ ਦਾ ਸਾਹਮਣਾ ਕਰਨਾ ਪੈ ਰਿਹਾ ਹੈ, ਤਾਂ PhotoRobot ਸਮੱਸਿਆ ਨਿਵਾਰਣ ਮੈਨੂਅਲ ਵਿੱਚ ਕੈਮਰਿਆਂ, ਰੋਬੋਟਾਂ, ਲਾਈਟਾਂ ਅਤੇ ਸੰਪਾਦਨ ਨੂੰ ਜੋੜਨ ਲਈ ਵਾਧੂ ਸਹਾਇਤਾ ਲੱਭੋ.
ਆਮ ਸੈਟਿੰਗਾਂ - ਕਲਾਉਡ ਆਟੋ ਬੈਕਅੱਪ, ਪ੍ਰੋਸੈਸਿੰਗ, ਟੱਚ ਐਪ
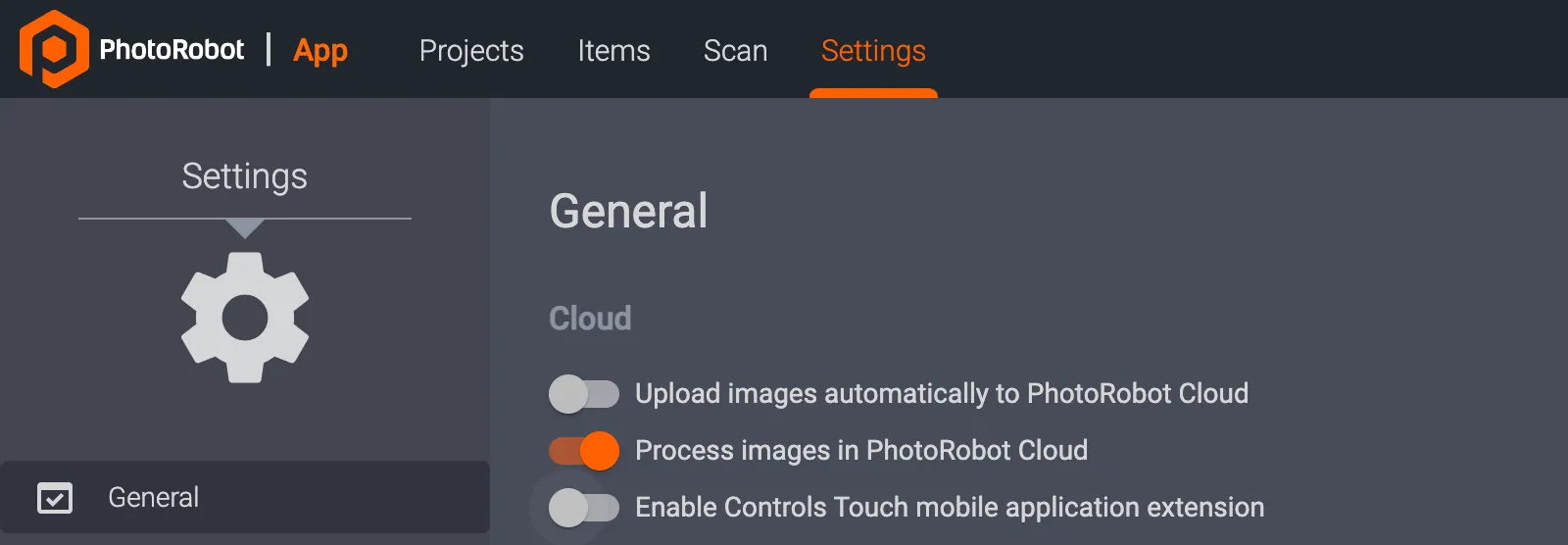
CAPP ਦੇ ਸਥਾਨਕ ਡੈਸਕਟਾਪ ਸੰਸਕਰਣ ਵਿੱਚ, ਚਾਲੂ ਜਾਂ ਬੰਦ ਕਰਨ ਲਈ 3 ਆਮ ਸੈਟਿੰਗਾਂ ਹਨ:
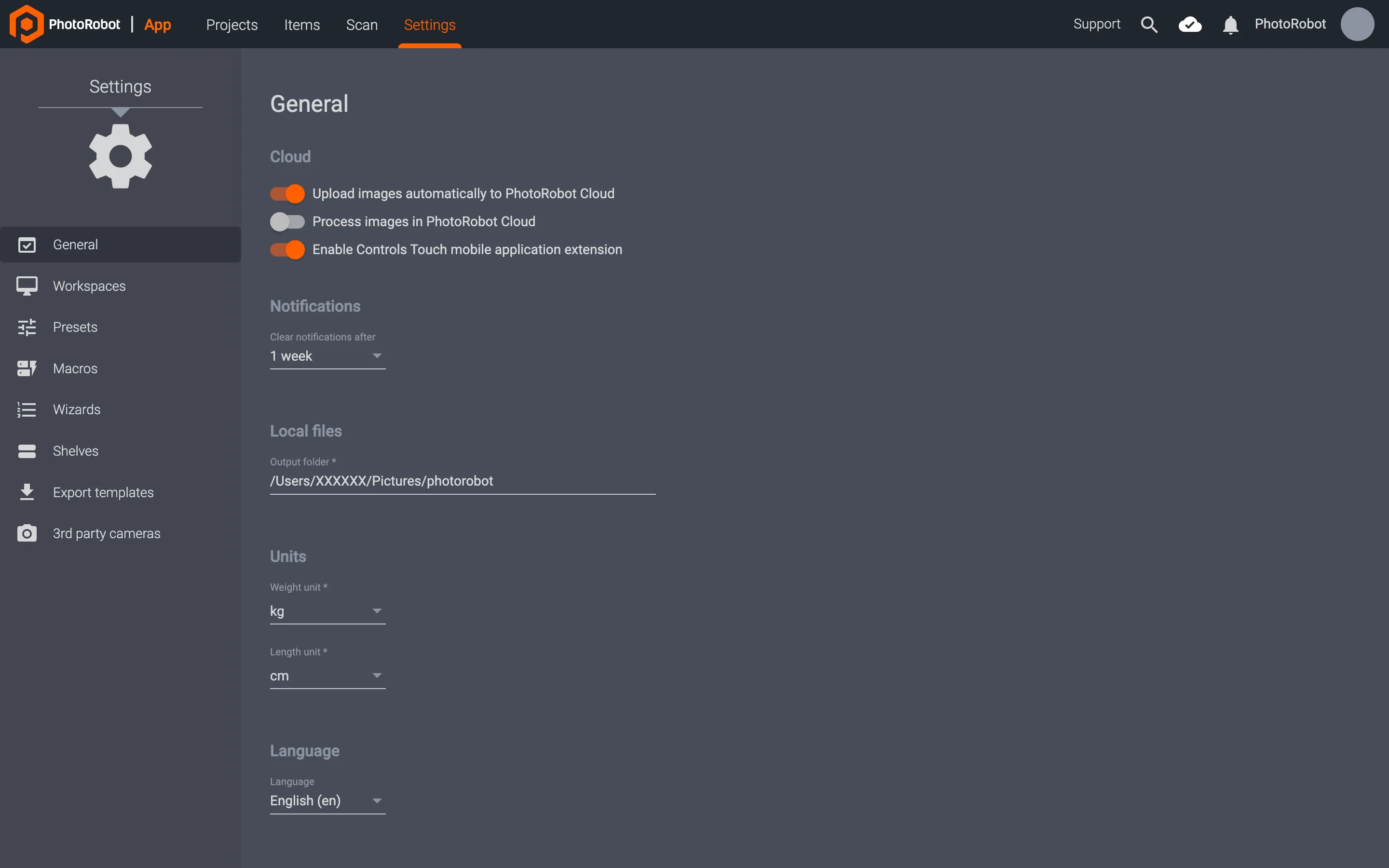
- ਚਿੱਤਰਾਂ ਨੂੰ ਆਪਣੇ ਆਪ Cloud 'ਤੇ ਅੱਪਲੋਡ PhotoRobot
- ਚਿੱਤਰਾਂ ਨੂੰ ਕਲਾਉਡ ਵਿੱਚ ਪ੍ਰੋਸੈਸ PhotoRobot
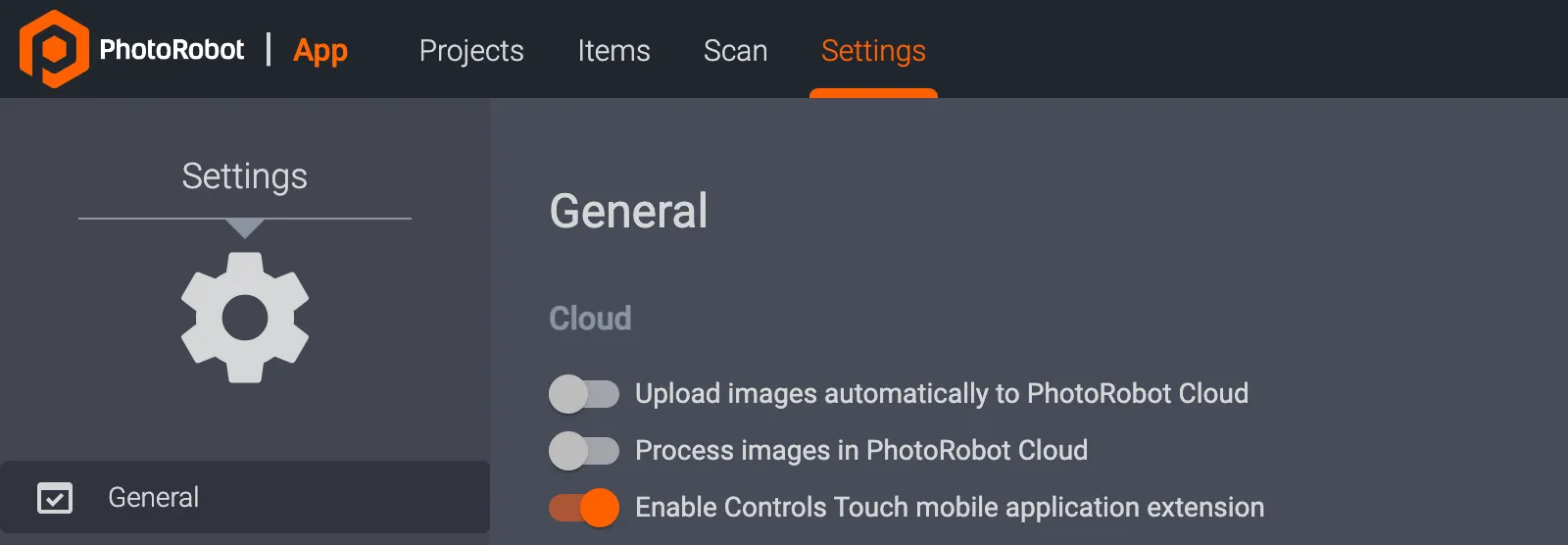
- ਕੰਟਰੋਲ ਟੱਚ ਮੋਬਾਈਲ ਐਪਲੀਕੇਸ਼ਨ ਐਕਸਟੈਂਸ਼ਨ ਨੂੰ ਸਮਰੱਥ ਕਰੋ
ਡਿਫੌਲਟ ਤੌਰ 'ਤੇ, ਸਥਾਨਕ ਐਪ ਨੂੰ ਆਪਣੇ ਆਪ ਕਲਾਉਡ 'ਤੇ ਚਿੱਤਰਾਂ ਨੂੰ ਅੱਪਲੋਡ ਕਰਨ ਲਈ ਸੈੱਟ PhotoRobot ਜਾਵੇਗਾ। ਇਹ ਵਿਸ਼ੇਸ਼ਤਾ ਬਾਅਦ ਵਿੱਚ ਨਿਰਯਾਤ ਲਈ ਆਪਣੇ ਆਪ ਕੈਪਚਰ ਕੀਤੀਆਂ ਤਸਵੀਰਾਂ ਦਾ ਬੈਕਅੱਪ ਤੁਹਾਡੇ ਕਲਾਉਡ ਸਰਵਰ 'ਤੇ ਸੁਰੱਖਿਅਤ ਕਰਦੀ ਹੈ।
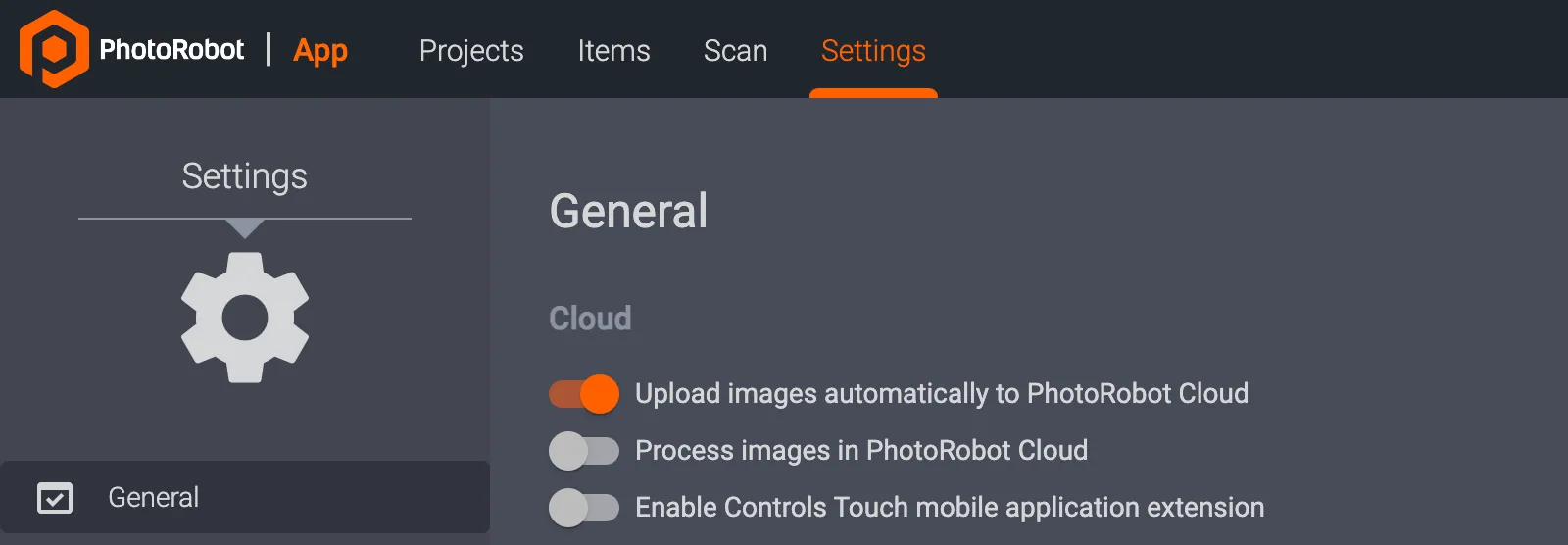
Cloud ਵਿੱਚ ਚਿੱਤਰਾਂ ਨੂੰ ਆਪਣੇ ਆਪ ਅੱਪਲੋਡ PhotoRobot ਅਸਮਰੱਥ ਕਰਨ ਲਈ, CAPP ਦੀਆਂ ਆਮ ਸੈਟਿੰਗਾਂ ਦੇ ਸਥਾਨਕ ਸੰਸਕਰਣ ਵਿੱਚ ਵਿਕਲਪ ਨੂੰ ਬੰਦ ਕਰੋ। ਇਹ ਇਸ ਦੀ ਬਜਾਏ ਕੈਪਚਰ ਕੀਤੀਆਂ ਆਈਟਮਾਂ ਨੂੰ ਤੁਹਾਡੇ ਸਥਾਨਕ ਐਪ ਜਾਂ ਤੁਹਾਡੇ ਆਪਣੇ ਕਲਾਉਡ ਖਾਤੇ ਵਿੱਚ ਸੁਰੱਖਿਅਤ ਕਰੇਗਾ।
ਕਲਾਉਡ ਵਿਸ਼ੇਸ਼ਤਾ ਵਿੱਚ ਪ੍ਰਕਿਰਿਆ ਚਿੱਤਰਾਂ ਨੂੰ ਸਮਰੱਥ ਜਾਂ ਅਸਮਰੱਥ ਕਰਨ ਲਈ ਟੌਗਲਾਂ ਦੀ ਵਰਤੋਂ PhotoRobot। ਜਦੋਂ ਚਾਲੂ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਇਹ ਵਿਸ਼ੇਸ਼ਤਾ ਕੈਪਚਰ ਕਰਨ ਤੋਂ ਬਾਅਦ PhotoRobot ਕਲਾਉਡ ਵਿੱਚ ਪ੍ਰੀਸੈਟਾਂ ਦੇ ਅਨੁਸਾਰ ਚਿੱਤਰਾਂ ਨੂੰ ਆਪਣੇ ਆਪ ਪੋਸਟ-ਪ੍ਰੋਸੈਸ ਕਰਦੀ ਹੈ।
ਜੇ iPhone ਲਈ PhotoRobot ਟੱਚ ਮੋਬਾਈਲ ਐਪਲੀਕੇਸ਼ਨ ਦੀ ਵਰਤੋਂ ਕਰ ਰਹੇ ਹੋ, ਤਾਂ ਕੰਟਰੋਲ ਸਮਰੱਥ ਕਰੋ ਟੱਚ ਮੋਬਾਈਲ ਐਪਲੀਕੇਸ਼ਨ ਐਕਸਟੈਂਸ਼ਨ ਨੂੰ ਟੌਗਲ ਕਰੋ।
ਨੋਟ: PhotoRobot ਟੱਚ ਦੀ ਸਥਾਪਨਾ ਅਤੇ ਸੰਚਾਲਨ ਬਾਰੇ ਤਕਨੀਕੀ ਹਦਾਇਤਾਂ ਵਾਸਤੇ, PhotoRobot iPhone Touch ਐਪ ਯੂਜ਼ਰ ਮੈਨੂਅਲ ਦੇਖੋ।
ਆਮ ਸੈਟਿੰਗਾਂ - ਨਵੀਂ ਆਈਟਮ ਨੂੰ ਸਵੈਚਲਿਤ ਬਣਾਓ
ਇਸ ਤੋਂ ਇਲਾਵਾ, ਸੀਏਪੀਪੀ ਦੇ ਸਥਾਨਕ ਡੈਸਕਟੌਪ ਸੰਸਕਰਣ ਵਿੱਚ ਆਮ ਸੈਟਿੰਗਾਂ ਵਿੱਚ, ਬਾਰਕੋਡ ਸਕੈਨਰ ਸੈਟਿੰਗਾਂ ਹਨ ਜੋ ਬਾਰਕੋਡ ਰੀਡਰ ਲਈ ਉੱਨਤ ਵਿਕਲਪਾਂ ਦੀ ਕੌਂਫਿਗਰੇਸ਼ਨ ਨੂੰ ਸਮਰੱਥ ਬਣਾਉਂਦੀਆਂ ਹਨ. ਆਟੋਮੈਟਿਕ ਆਈਟਮ ਬਣਾਉਣ ਨੂੰ ਸਮਰੱਥ ਜਾਂ ਅਸਮਰੱਥ ਕਰਨ ਲਈ ਅਗਿਆਤ ਬਾਰਕੋਡ ਨੂੰ ਸਕੈਨ ਕੀਤੇ ਜਾਣ \'ਤੇ ਸਿਸਟਮ ਵਿੱਚ ਆਟੋਮੈਟਿਕ ਤੌਰ 'ਤੇ ਨਵੀਂ ਆਈਟਮ ਬਣਾਓ ਦੇ ਖੱਬੇ ਪਾਸੇ ਟੌਗਲ ਦੀ ਵਰਤੋਂ ਕਰੋ।
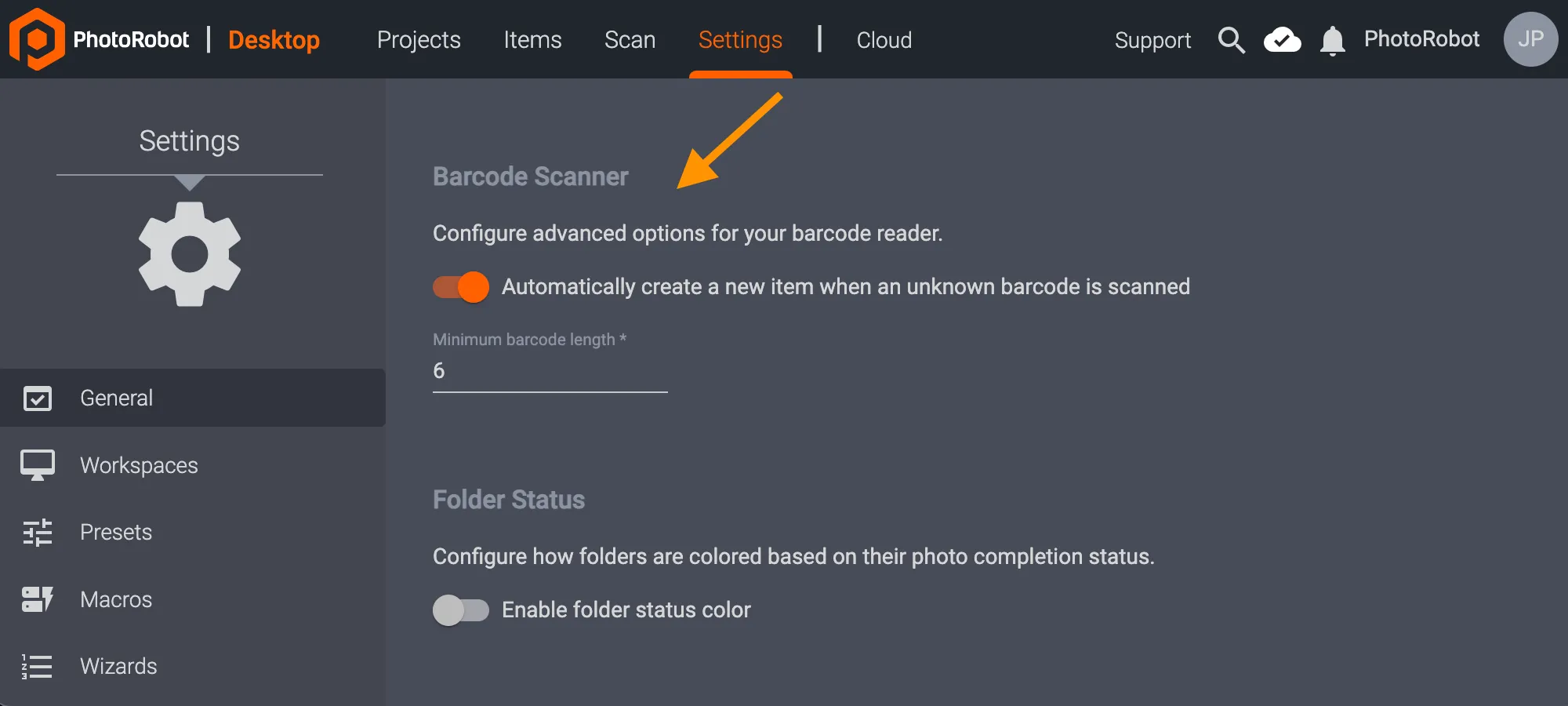
ਕਿਰਿਆਸ਼ੀਲ ਹੋਣ 'ਤੇ, ਸੈਟਿੰਗ ਮੈਨੂਅਲ ਆਈਟਮ ਬਣਾਉਣ ਦੇ ਵਿਕਲਪ ਵਜੋਂ ਕੰਮ ਕਰੇਗੀ। ਇਹ ਕੈਪਚਰ ਦੇ ਬਿੰਦੂ 'ਤੇ ਕਿਸੇ ਆਈਟਮ ਦੀ ਪਛਾਣ ਕਰਨ ਦੇ ਯੋਗ ਬਣਾਉਂਦਾ ਹੈ (ਆਮ ਤੌਰ 'ਤੇ ਬਾਰਕੋਡ ਜਾਂ QR ਕੋਡ ਦੁਆਰਾ). ਇੱਕ ਆਪਰੇਟਰ ਬਸ ਇੱਕ ਅਣਜਾਣ ਕੋਡ ਨੂੰ ਸਕੈਨ ਕਰਦਾ ਹੈ, ਅਤੇ ਪ੍ਰੋਜੈਕਟ ਵਿੱਚ ਇੱਕ ਨਵੀਂ ਆਈਟਮ ਆਪਣੇ ਆਪ ਬਣ ਜਾਂਦੀ ਹੈ. ਆਈਟਮ ਦਾ ਨਾਮ ਸਕੈਨ ਕੀਤੀ ਸਤਰ ਦੇ ਅਨੁਸਾਰ ਅਤੇ ਆਈਟਮ ਦੇ ਪਛਾਣਕਰਤਾ ਖੇਤਰ ਵਿੱਚ ਹੋਵੇਗਾ. ਫਿਰ, ਆਪਰੇਟਰ ਆਈਟਮ ਦੀ ਫੋਟੋ ਖਿੱਚਦਾ ਹੈ.
ਇਸ ਤਰੀਕੇ ਨਾਲ, ਸਟੂਡੀਓ ਸਾੱਫਟਵੇਅਰ ਦੇ ਅੰਦਰ ਕਿਸੇ ਵੀ ਵਸਤੂ ਸੂਚੀ ਨਾਲ ਸਬੰਧਤ ਓਪਰੇਸ਼ਨ ਕਰਨ ਦੀ ਜ਼ਰੂਰਤ ਨਹੀਂ ਹੈ. ਉਦਾਹਰਣ ਦੇ ਲਈ, ਇੱਕ ਨਵੀਂ ਆਈਟਮ ਨੂੰ ਸਕੈਨ ਕਰਨਾ ਅਤੇ ਬਾਅਦ ਵਿੱਚ ਫੋਟੋਗ੍ਰਾਫੀ ਲਈ ਇੱਕ ਪ੍ਰੀਸੈਟ (ਸ਼ੈਲਫ) ਕੋਡ ਨੂੰ ਸਕੈਨ ਕਰਨਾ ਕਾਫ਼ੀ ਹੈ (ਜਿਵੇਂ ਕਿ ਚਿੱਟੇ, ਹਨੇਰੇ ਜਾਂ ਰੰਗੀਨ ਚੀਜ਼ਾਂ ਲਈ). ਸਿਸਟਮ ਫਿਰ ਆਪਣੇ ਆਪ ਅਤੇ ਤੁਰੰਤ ਫੋਟੋਆਂ ਦਾ ਇੱਕ ਪੂਰਾ ਸੈੱਟ ਪ੍ਰਦਾਨ ਕਰੇਗਾ, ਉਨ੍ਹਾਂ ਨੂੰ ਪੂਰੀ ਤਰ੍ਹਾਂ ਪੋਸਟ-ਪ੍ਰੋਸੈਸ ਕਰੇਗਾ, ਅਤੇ ਉਨ੍ਹਾਂ ਨੂੰ ਟੀਚੇ ਦੇ ਸਿਸਟਮ ਨੂੰ ਆਟੋਮੈਟਿਕ ਨਾਮਕਰਨ ਨਾਲ ਵੰਡੇਗਾ.
ਇਸ ਤੋਂ ਇਲਾਵਾ, ਸੀਏਪੀਪੀ ਸੰਸਕਰਣ 2.13.beta58 ਦੇ ਅਨੁਸਾਰ, ਹੁਣ ਬਾਰਕੋਡਾਂ ਲਈ ਘੱਟੋ ਘੱਟ ਸਤਰ ਦੀ ਲੰਬਾਈ ਨੂੰ ਕੌਂਫਿਗਰ ਕਰਨ ਦਾ ਵਿਕਲਪ ਹੈ. ਪਹਿਲਾਂ, ਘੱਟੋ ਘੱਟ ਬਾਰਕੋਡ / QR ਕੋਡ ਦੀ ਲੰਬਾਈ 6 ਅੱਖਰ ਸੀ (ਹੋਰ ਮੁੱਦਿਆਂ ਦੇ ਵਿਚਕਾਰ ਸਕੈਨ ਕੀਤੀ ਸਤਰ ਦੀ ਦੋਹਰੀ ਵਿਆਖਿਆ ਤੋਂ ਬਚਣ ਲਈ). ਹੁਣ, ਘੱਟੋ ਘੱਟ ਬਾਰਕੋਡ ਲੰਬਾਈ ਸੈਟਿੰਗ ਵਿਵਸਥਤ ਕਰਨ ਯੋਗ ਹੈ, ਉਦਾਹਰਣ ਵਜੋਂ, ਚਾਰ-ਅੱਖਰ ਪਛਾਣਕਰਤਾਵਾਂ ਨੂੰ ਹੋਰ ਸਮਾਯੋਜਨ ਦੀ ਜ਼ਰੂਰਤ ਤੋਂ ਬਿਨਾਂ ਕੰਮ ਕਰਨ ਦੀ ਆਗਿਆ ਦੇਣ ਲਈ.
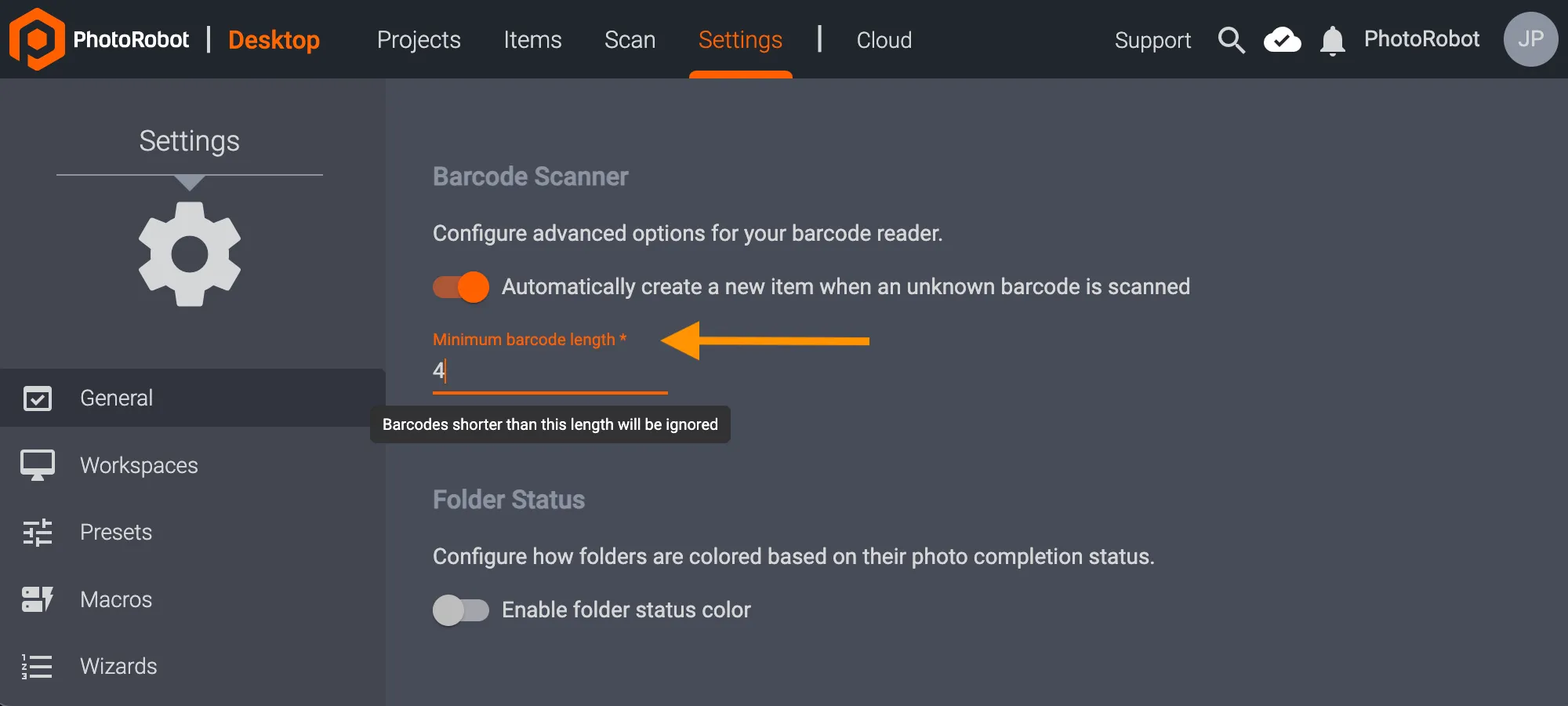
ਬਾਰਕੋਡਾਂ / QR ਕੋਡਾਂ ਲਈ ਘੱਟੋ-ਘੱਟ ਸਤਰ ਦੀ ਲੰਬਾਈ ਨੂੰ ਵਿਵਸਥਿਤ ਕਰਨ ਲਈ, ਆਮ ਸੈਟਿੰਗਾਂ - ਬਾਰਕੋਡ ਸਕੈਨਰ ਵਿੱਚ CAPP ਦੇ ਸਥਾਨਕ ਸੰਸਕਰਣ ਵਿੱਚ ਵੀ ਘੱਟੋ-ਘੱਟ ਬਾਰਕੋਡ ਦੀ ਲੰਬਾਈ ਨੂੰ ਕੌਨਫਿਗਰ ਕਰੋ। ਲੰਬਾਈ ਦੇ ਇੰਪੁੱਟ ਤੋਂ ਛੋਟੇ ਬਾਰਕੋਡਾਂ ਨੂੰ ਫਿਰ ਸਿਸਟਮ ਦੁਆਰਾ ਨਜ਼ਰਅੰਦਾਜ਼ ਕੀਤਾ ਜਾਵੇਗਾ।
ਨੋਟ: ਕਿਸੇ ਆਈਟਮ ਨੂੰ ਸਿਸਟਮ ਵਿੱਚ ਬਾਰਕੋਡ ਦਿੱਤੇ ਜਾਣ ਤੋਂ ਬਾਅਦ, ਬਾਰਕੋਡ ਨੂੰ ਬਾਰਕੋਡ ਬਟਨ ਰਾਹੀਂ ਆਈਟਮ ਜਾਣਕਾਰੀ ਖੇਤਰ ਵਿੱਚ ਕੈਪਚਰ ਮੋਡ ਇੰਟਰਫੇਸ ਵਿੱਚ ਸਿੱਧੇ ਤੌਰ 'ਤੇ ਪਹੁੰਚਯੋਗ ਕੀਤਾ ਜਾਵੇਗਾ।
ਗਾਹਕ ਨੂੰ ਪ੍ਰੋਜੈਕਟ ਡੇਟਾ ਤੱਕ ਬਾਹਰੀ ਪਹੁੰਚ ਪ੍ਰਦਾਨ ਕਰਨਾ
ਭੁਗਤਾਨ ਕੀਤੇ CAPP ਖਾਤੇ ਦੇ ਸੰਗਠਨ ਤੋਂ ਬਾਹਰ ਗਾਹਕਾਂ ਨਾਲ ਕੰਮ ਕਰਨ ਲਈ, ਖਾਤੇ ਦਾ ਇੱਕ ਪ੍ਰਬੰਧਕ ਗਾਹਕ ਖਾਤੇ ਮੁਫਤ ਬਣਾਉਣ ਦੇ ਯੋਗ ਹੁੰਦਾ ਹੈ। ਗਾਹਕ ਖਾਤੇ ਇੱਕ ਬਾਹਰੀ ਗਾਹਕ ਨੂੰ ਪ੍ਰੋਜੈਕਟ ਡੇਟਾ ਵੇਖਣ, ਸਮੀਖਿਆ ਅਤੇ ਟਿੱਪਣੀਆਂ ਰਾਹੀਂ ਗੁਣਵੱਤਾ ਭਰੋਸਾ ਵਿੱਚ ਭਾਗ ਲੈਣ ਅਤੇ ਡਾਊਨਲੋਡ ਲਈ ਪ੍ਰੋਜੈਕਟ ਸੰਪਤੀਆਂ ਤੱਕ ਪਹੁੰਚ ਕਰਨ ਦੇ ਯੋਗ ਬਣਾਉਂਦੇ ਹਨ। ਇਹ ਵਿਸ਼ੇਸ਼ਤਾ ਉਹਨਾਂ ਸਥਿਤੀਆਂ ਲਈ ਹੈ ਜਿੱਥੇ ਇੱਕ ਫੋਟੋ ਸਟੂਡੀਓ ਕਿਸੇ ਬਾਹਰੀ ਗਾਹਕ ਨਾਲ ਕੰਮ ਕਰ ਰਿਹਾ ਹੈ ਜਿਸ ਨੂੰ ਵਿਸ਼ੇਸ਼ ਨੌਕਰੀਆਂ ਤੱਕ ਪਹੁੰਚ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।
ਤੁਹਾਡੀ ਸੰਸਥਾ ਤੋਂ ਬਾਹਰ ਕਿਸੇ ਗਾਹਕ ਨਾਲ ਕਿਸੇ ਪ੍ਰੋਜੈਕਟ ਨੂੰ ਸਾਂਝਾ ਕਰਨ ਲਈ, ਪਹਿਲਾਂ ਇਹ ਯਕੀਨੀ ਬਣਾਓ ਕਿ ਤੁਸੀਂ ਪ੍ਰਸ਼ਾਸਕ ਵਿਸ਼ੇਸ਼ ਅਧਿਕਾਰ ਵਾਲੇ ਉਪਭੋਗਤਾ ਪ੍ਰੋਫਾਈਲ ਦੀ ਵਰਤੋਂ ਕਰਕੇ CAPP ਦੇ ਕਲਾਉਡ ਸੰਸਕਰਣ ਵਿੱਚ ਲੌਗਇਨ ਕਰਦੇ ਹੋ।
1. ਐਡਮਿਨਿਸਟ੍ਰੇਟਰ ਵਿਸ਼ੇਸ਼ ਅਧਿਕਾਰ ਦੇ ਨਾਲ ਭੁਗਤਾਨ ਕੀਤੇ CAPP ਖਾਤਾ ਪ੍ਰੋਫਾਈਲ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਕਲਾਉਡ-ਅਧਾਰਤ ਐਪ ਵਿੱਚ ਲੌਗ ਇਨ ਕਰੋ, ਅਤੇ ਡੈਸ਼ਬੋਰਡ ਦੇ ਉੱਪਰਲੇ-ਸੱਜੇ ਕੋਨੇ ਵਿੱਚ ਉਪਭੋਗਤਾ ਪ੍ਰੋਫਾਈਲ ਮੇਨੂ ਆਈਕਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ। ਫਿਰ, ਪ੍ਰਸ਼ਾਸਨ ਪੈਨਲ ਤੱਕ ਪਹੁੰਚ ਕਰਨ ਲਈ ਸੰਗਠਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ।
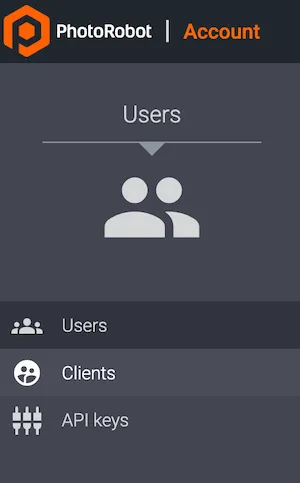
2. ਅੱਗੇ, ਸੰਗਠਨ ਪ੍ਰਸ਼ਾਸਨ ਪੈਨਲ ਤੋਂ, ਉਪਭੋਗਤਾ ਇੰਟਰਫੇਸ ਦੇ ਸਿਖਰ 'ਤੇ ਖਾਤੇ ਦੇ ਵਿਕਲਪਾਂ ਤੋਂ ਉਪਭੋਗਤਾਵਾਂ 'ਤੇ ਕਲਿੱਕ ਕਰੋ.

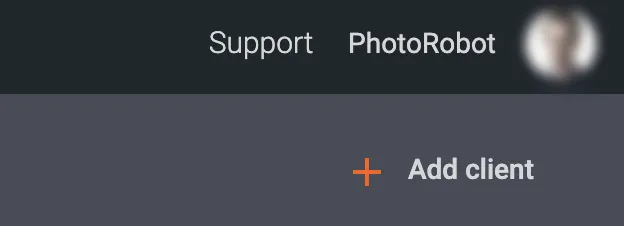
3. ਅਕਾਊਂਟ ਇੰਟਰਫੇਸ ਤੋਂ ਗਾਹਕਾਂ ਨੂੰ ਜੋੜੋ ਦੀ ਵਿਸ਼ੇਸ਼ਤਾ ਨੂੰ ਐਕਸੈਸ ਕਰਨ ਲਈ ਨਵਾਂ ਉਪਭੋਗਤਾ ਵਿਕਲਪ ਬਣਾਉਣ ਲਈ ਕਲਾਇੰਟਾਂ 'ਤੇ ਕਲਿੱਕ ਕਰੋ। + ਗਾਹਕ ਜੋੜੋ ਬਟਨ ਉਪਭੋਗਤਾ ਪ੍ਰੋਫਾਈਲ ਆਈਕਨ ਦੇ ਤਹਿਤ ਡੈਸ਼ਬੋਰਡ ਦੇ ਉੱਪਰ-ਸੱਜੇ ਪਾਸੇ ਦਿਖਾਈ ਦੇਵੇਗਾ।
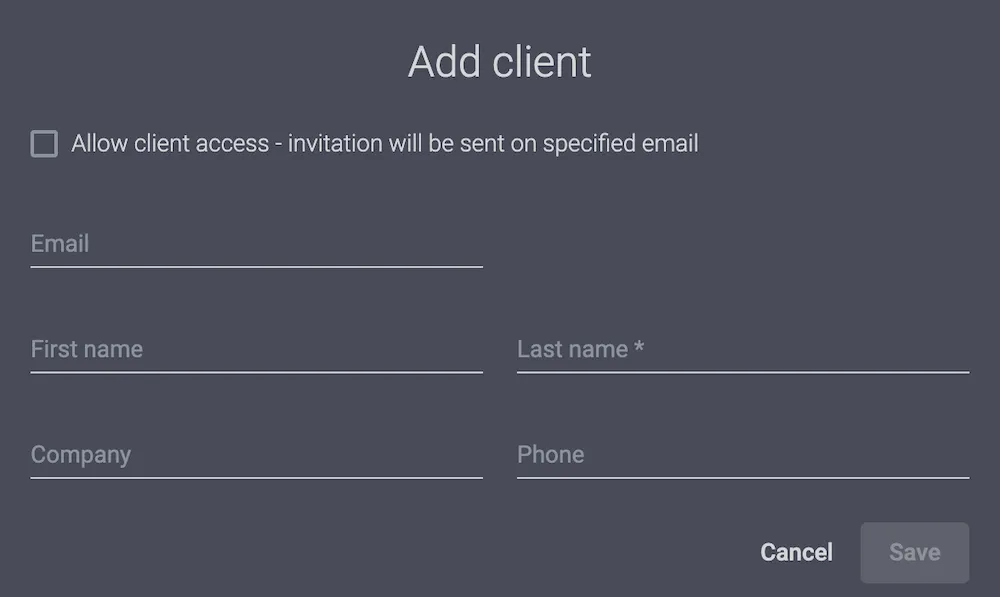
4. ਯੂਜ਼ਰ ਪ੍ਰੋਫਾਈਲ ਆਈਕਨ ਦੇ ਹੇਠਾਂ + ਕਲਾਇੰਟ ਐਡ ਕਰੋ 'ਤੇ ਕਲਿੱਕ ਕਰੋ।
5. ਗਾਹਕ ਦੀ ਜਾਣਕਾਰੀ (ਈਮੇਲ, ਨਾਮ, ਕੰਪਨੀ, ਫ਼ੋਨ) ਲਈ ਫੀਲਡ ਾਂ ਨੂੰ ਪੂਰਾ ਕਰੋ, ਅਤੇ ਬਾਕਸ ਦੀ ਜਾਂਚ ਕਰੋ ਕਲਾਇੰਟ ਐਕਸੈਸ ਦੀ ਆਗਿਆ ਦਿਓ। ਸਟੀਕਤਾ ਵਾਸਤੇ ਜਾਣਕਾਰੀ ਦੀ ਸਮੀਖਿਆ ਕਰੋ, ਅਤੇ ਕਲਾਇੰਟ ਨੂੰ CAPP ਵਿੱਚ ਸ਼ਾਮਲ ਕਰਨ ਲਈ ਸੰਭਾਲੋ 'ਤੇ ਕਲਿੱਕ ਕਰੋ।
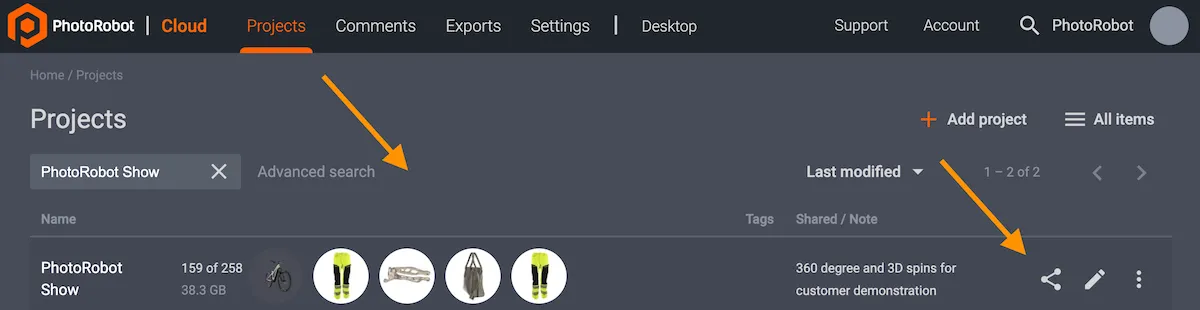
6. CAPP ਦੇ ਕਲਾਉਡ ਸੰਸਕਰਣ ਵਿੱਚ ਪ੍ਰੋਜੈਕਟ ਖੋਲ੍ਹੋ, ਉਸ ਪ੍ਰੋਜੈਕਟ ਨੂੰ ਲੱਭੋ ਜਿਸਨੂੰ ਤੁਸੀਂ ਸੁਰੱਖਿਅਤ ਕਲਾਇੰਟ ਨਾਲ ਸਾਂਝਾ ਕਰਨਾ ਚਾਹੁੰਦੇ ਹੋ, ਪ੍ਰੋਜੈਕਟ ਬਾਰ 'ਤੇ ਮਾਊਸ ਨੂੰ ਘੁੰਮਾਓ, ਅਤੇ ਪ੍ਰੋਜੈਕਟ ਵੇਰਵਿਆਂ ਦੇ ਸੱਜੇ ਪਾਸੇ ਸ਼ੇਅਰ ਆਈਕਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ।
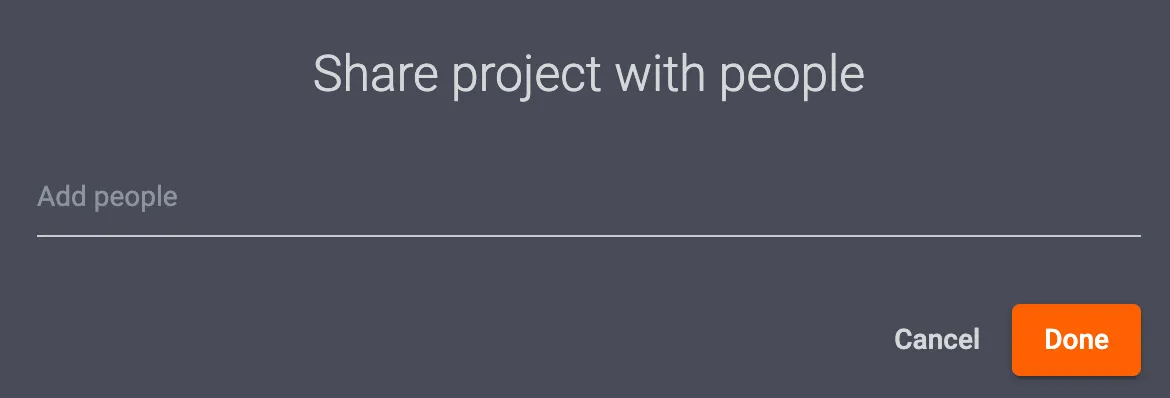
7. ਸ਼ੇਅਰ ਪ੍ਰੋਜੈਕਟ ਵਿਥ ਪੀਪਲ ਫੀਚਰ ਨੂੰ ਖੋਲ੍ਹਣ ਲਈ ਪ੍ਰੋਜੈਕਟ ਬਾਰ ਦੇ ਸੱਜੇ ਪਾਸੇ ਸ਼ੇਅਰ ਆਈਕਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ, ਸੁਰੱਖਿਅਤ ਗਾਹਕਾਂ ਦੀ ਚੋਣ ਕਰੋ, ਅਤੇ ਪੂਰਾ ਕੀਤਾ 'ਤੇ ਕਲਿੱਕ ਕਰੋ. ਪ੍ਰੋਜੈਕਟ ਨੂੰ ਹੁਣ ਗਾਹਕ ਨਾਲ ਸਾਂਝਾ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਜਿਸ ਨਾਲ ਉਹ ਨੌਕਰੀ ਨੂੰ ਦੇਖ ਸਕਦੇ ਹਨ ਅਤੇ ਗੁਣਵੱਤਾ ਦੇ ਭਰੋਸੇ ਅਤੇ ਜੇ ਜ਼ਰੂਰੀ ਹੋਵੇ ਤਾਂ ਵਾਧੂ ਨਿਰਦੇਸ਼ਾਂ ਲਈ ਸੀਏਪੀਪੀ ਵਿੱਚ ਟਿੱਪਣੀ ਕਰ ਸਕਦੇ ਹਨ.
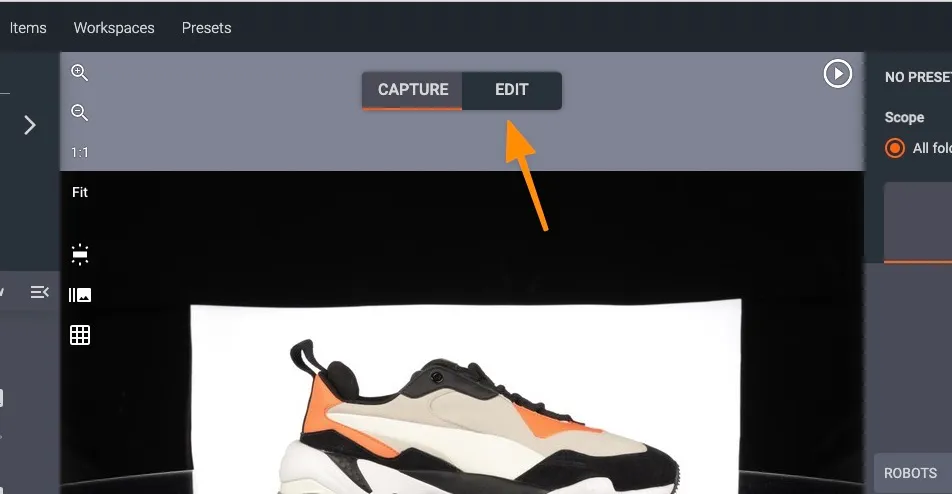
ਕੈਪਚਰ ਮੋਡ ਇੰਟਰਫੇਸ
ਕਿਸੇ ਆਈਟਮ 'ਤੇ ਕਲਿੱਕ ਕਰਨ ਤੋਂ ਬਾਅਦ, ਤੁਹਾਨੂੰ ਕੈਪਚਰ/ਸੰਪਾਦਿਤ ਇੰਟਰਫੇਸ 'ਤੇ ਲਿਜਾਇਆ ਜਾਵੇਗਾ। ਤੁਹਾਡੇ ਲਈ ਉਪਲਬਧ ਕੰਟਰੋਲ ਕੈਪਚਰ ਮੋਡ ਦੇ ਕਿਰਿਆਸ਼ੀਲ ਹੋਣ ਜਾਂ ਸੰਪਾਦਿਤ ਮੋਡ ਦੇ ਆਧਾਰ 'ਤੇ ਬਦਲਦੇ ਹਨ। ਕੈਪਚਰ ਮੋਡ ਦੀ ਵਰਤੋਂ ਫੋਟੋਗਰਾਫੀ ਲੜੀ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਨ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਜਦੋਂ ਕਿ ਸੰਪਾਦਨ ਮੋਡ CAPP ਦੇ ਅੰਦਰ ਕੀਤੀ ਗਈ ਸਾਰੀ ਪੋਸਟ-ਪ੍ਰੋਸੈਸਿੰਗ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਦਾ ਹੈ। ਕਿਰਿਆਸ਼ੀਲ ਮੋਡ ਨੂੰ ਸਕ੍ਰੀਨ ਦੇ ਸਿਖਰ \'ਤੇ ਹਾਈਲਾਈਟ ਕੀਤਾ ਜਾਵੇਗਾ:
ਸਪਿੱਨ, ਸਟਿੱਲ, ਜਾਂ ਵਿਡੀਓ ਫੋਲਡਰ ਜੋੜਿਆ ਜਾ ਰਿਹਾ ਹੈ
ਕਿਸੇ ਵੀ ਫੋਟੋਸ਼ੂਟ ਤੋਂ ਪਹਿਲਾਂ, ਤੁਹਾਨੂੰ ਘੱਟੋ ਘੱਟ ਇੱਕ ਫੋਲਡਰ ਬਣਾਉਣਾ ਚਾਹੀਦਾ ਹੈ। ਫੋਲਡਰਾਂ ਦੀਆਂ ਮੁੱਖ ਕਿਸਮਾਂ ਸਪਿਨ (360° ਪੇਸ਼ਕਾਰੀਆਂ ਲਈ ਵਰਤੀਆਂ ਜਾਂਦੀਆਂ ਹਨ), ਸਟਿੱਲ (ਸਥਿਰ ਚਿੱਤਰਾਂ ਲਈ), ਅਤੇ ਵੀਡੀਓ (ਵੀਡੀਓ ਲਈ) ਹਨ।
ਸਪਿਨ ਫੋਲਡਰ ਬਣਾਇਆ ਜਾ ਰਿਹਾ ਹੈ
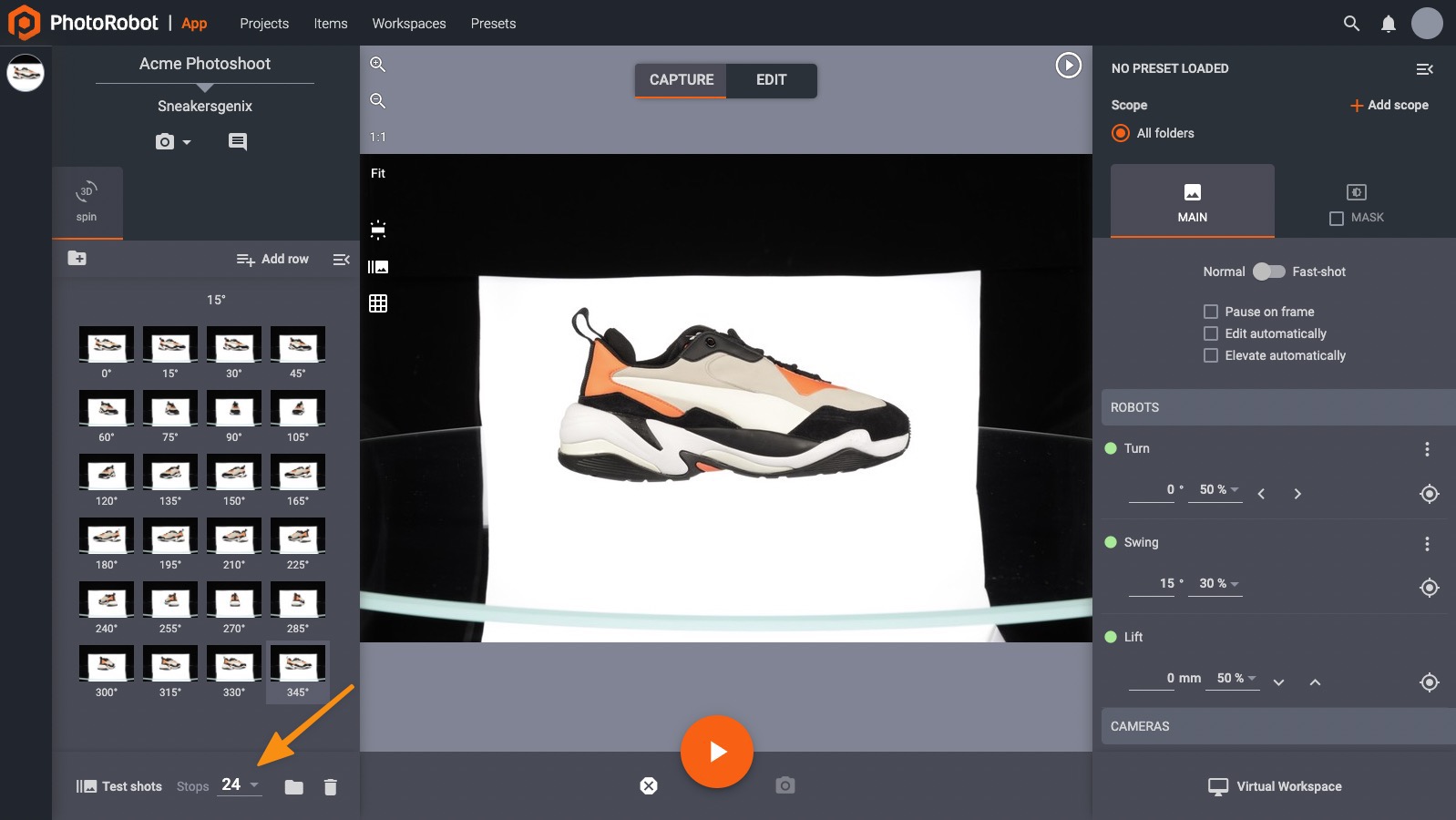
ਸਪਿੱਨ ਫੋਲਡਰ ਨੂੰ ਸ਼ਾਮਲ ਕਰਨ ਵੇਲੇ, CAPP ਤੁਹਾਡੇ ਵੱਲੋਂ ਚੁਣੇ ਗਏ ਪ੍ਰਤੀ ਸਪਿਨ ਕਿੰਨੇ ਚਿੱਤਰਾਂ ਦੇ ਆਧਾਰ 'ਤੇ ਆਪਣੇ-ਆਪ ਹੀ ਸਟਾਪਾਂ (ਜਿਸਨੂੰ "ਫਰੇਮ" ਵੀ ਕਹਿੰਦੇ ਹਨ) ਨੂੰ ਜੋੜ ਦੇਵੇਗਾ। ਡਿਫੌਲਟ ਨੰਬਰ 36 ਹੈ, ਅਤੇ ਇਸਨੂੰ ਹੇਠਲੇ ਖੱਬੇ ਕੋਨੇ ਵਿੱਚ ਬਦਲਿਆ ਜਾ ਸਕਦਾ ਹੈ। ਸਟਾਪਾਂ ਦੀ ਵਧੇਰੇ ਸੰਖਿਆ ਦੇ ਨਾਲ, ਰੋਟੇਸ਼ਨ ਵਧੇਰੇ ਨਿਰਵਿਘਨ ਹੋਵੇਗੀ, ਪਰ ਇਹ ਵਧੇਰੇ ਸਟੋਰੇਜ ਸਪੇਸ ਵੀ ਲਵੇਗੀ।
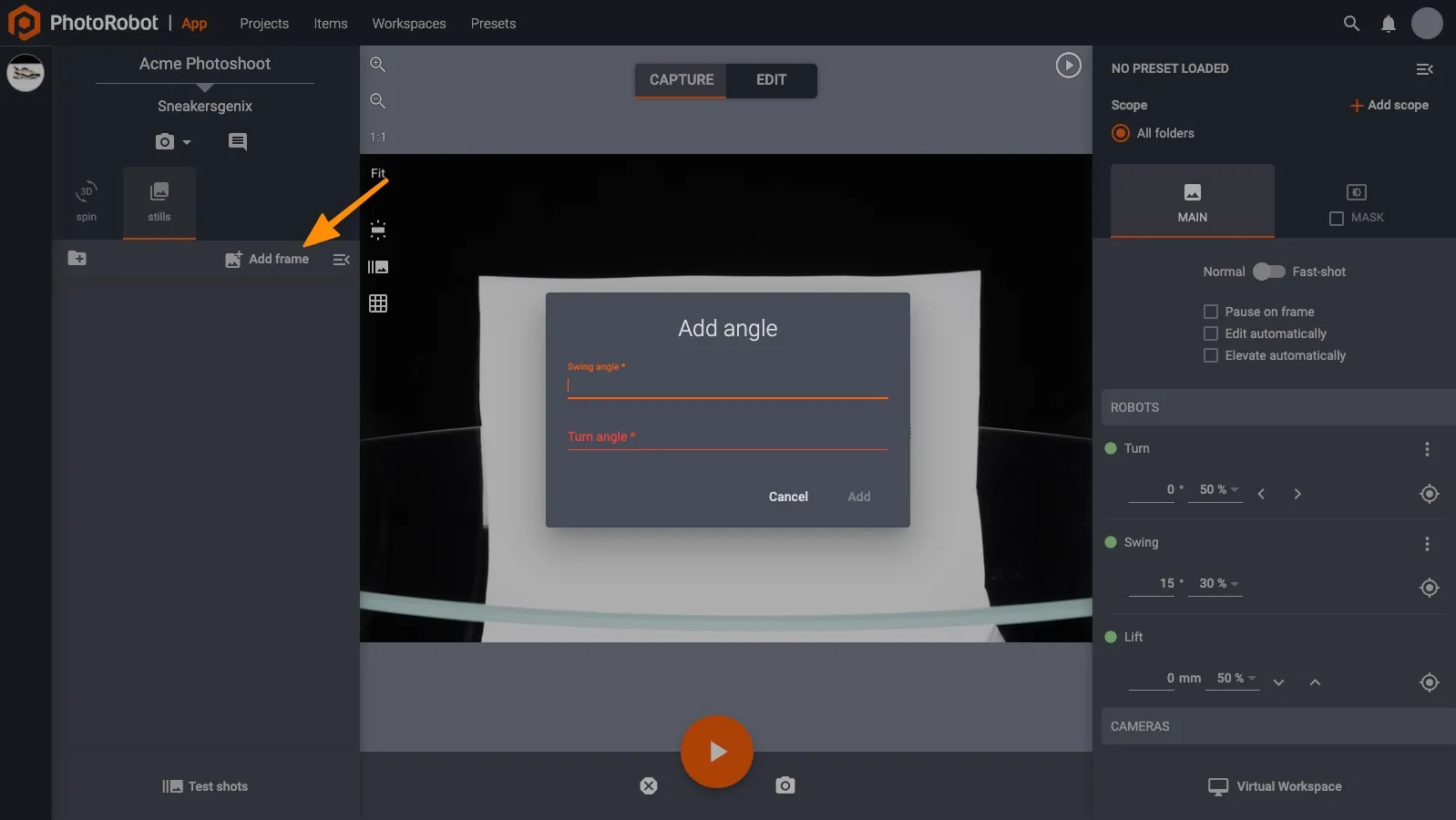
ਇੱਕ ਸਟਿੱਲ ਫੋਲਡਰ ਬਣਾਇਆ ਜਾ ਰਿਹਾ ਹੈ
ਜੇ ਤੁਸੀਂ ਇੱਕ ਸਟਿੱਲਜ਼ ਫੋਲਡਰ ਦੀ ਚੋਣ ਕਰਦੇ ਹੋ, ਤਾਂ ਤੁਹਾਨੂੰ ਆਪਣੇ ਸਟਾਪਾਂ ਨੂੰ ਮੈਨੂਅਲੀ ਜੋੜਨਾ ਚਾਹੀਦਾ ਹੈ। ਇਸ ਵਿੱਚ ਇੱਕ ਟਰਨ ਐਂਗਲ (ਰੋਟੇਸ਼ਨਲ ਐਂਗਲ) ਅਤੇ ਇੱਕ ਸਵਿੰਗ ਐਂਗਲ (ਇੱਕ ਗੋਲਾਕਾਰ ਚਾਲ ਦੇ ਨਾਲ ਕੈਮਰੇ ਦੀ ਖੜ੍ਹਵੀਂ ਸਥਿਤੀ) ਸ਼ਾਮਲ ਹੋਣਗੇ। ਸਵਿੰਗ ਐਂਗਲ ਮਹੱਤਵਪੂਰਨ ਹੈ ਜੇ ਤੁਸੀਂ ਸਾਡੀ ਰੋਬੋਟਿਕ ਆਰਮ ਜਾਂ ਕਿਸੇ ਹੋਰ ਮਾਡਿਊਲ ਦੀ ਵਰਤੋਂ ਕਰ ਰਹੇ ਹੋ ਜੋ ਕੈਮਰੇ ਦੀ ਖਿਤਿਜੀ ਸਥਿਤੀ ਨੂੰ ਬਦਲ ਸਕਦਾ ਹੈ।
ਚਿੱਤਰਾਂ ਨੂੰ ਆਯਾਤ ਕਰੋ
ਕੁਝ ਮਾਮਲਿਆਂ ਵਿੱਚ, ਹੋ ਸਕਦਾ ਹੈ ਤੁਸੀਂ ਚਿੱਤਰਾਂ ਨੂੰ CAPP ਵਿੱਚ ਕਿਸੇ ਨਵੇਂ ਜਾਂ ਮੌਜੂਦਾ ਫੋਲਡਰ ਵਿੱਚ ਆਯਾਤ ਕਰਨਾ ਚਾਹੋਂ। ਉਦਾਹਰਣ ਵਜੋਂ ਹੈਂਡਹੈਲਡ ਫੋਟੋਆਂ, ਵਿਸਤ੍ਰਿਤ ਸ਼ਾਟਸ, ਜਾਂ ਹੋਰ ਵਿਭਿੰਨ ਚਿੱਤਰਾਂ ਨੂੰ ਆਯਾਤ ਕਰਨਾ।
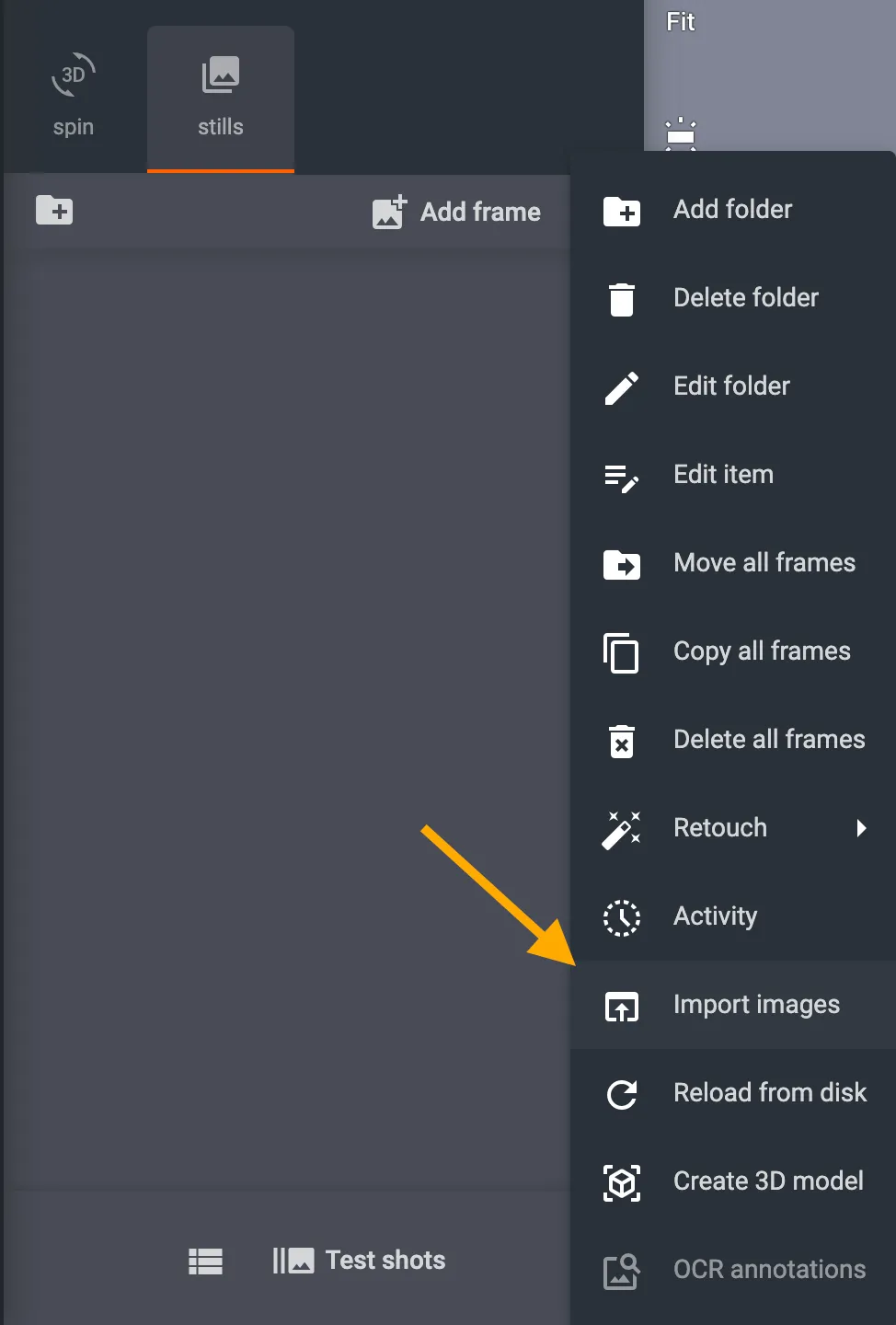
CAPP ਵਿੱਚ ਚਿੱਤਰਾਂ ਨੂੰ ਆਯਾਤ ਕਰਨ ਲਈ, ਪਹਿਲਾਂ CAPP ਵਿੱਚ ਕੈਪਚਰ ਮੋਡ ਇੰਟਰਫੇਸ ਵਿੱਚ ਇੱਕ ਨਵੀਂ ਜਾਂ ਮੌਜੂਦਾ ਆਈਟਮ ਖੋਲ੍ਹੋ। ਅੱਗੇ, ਫੋਲਡਰ ਇੰਟਰਫੇਸ ਦੇ ਉੱਪਰਲੇ-ਸੱਜੇ ਕੋਨੇ ਵਿੱਚ ਫੋਲਡਰ ਸੰਚਾਲਨ ਮੇਨੂ ਲਈ ਆਈਕਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ।
ਫਿਰ, ਫੋਲਡਰ ਸੰਚਾਲਨ ਮੀਨੂ ਵਿਕਲਪਾਂ ਵਿੱਚ, ਸੂਚੀ ਵਿੱਚੋਂ ਚਿੱਤਰਾਂ ਨੂੰ ਆਯਾਤ ਕਰੋ ਲੱਭੋ ਅਤੇ ਕਲਿੱਕ ਕਰੋ।
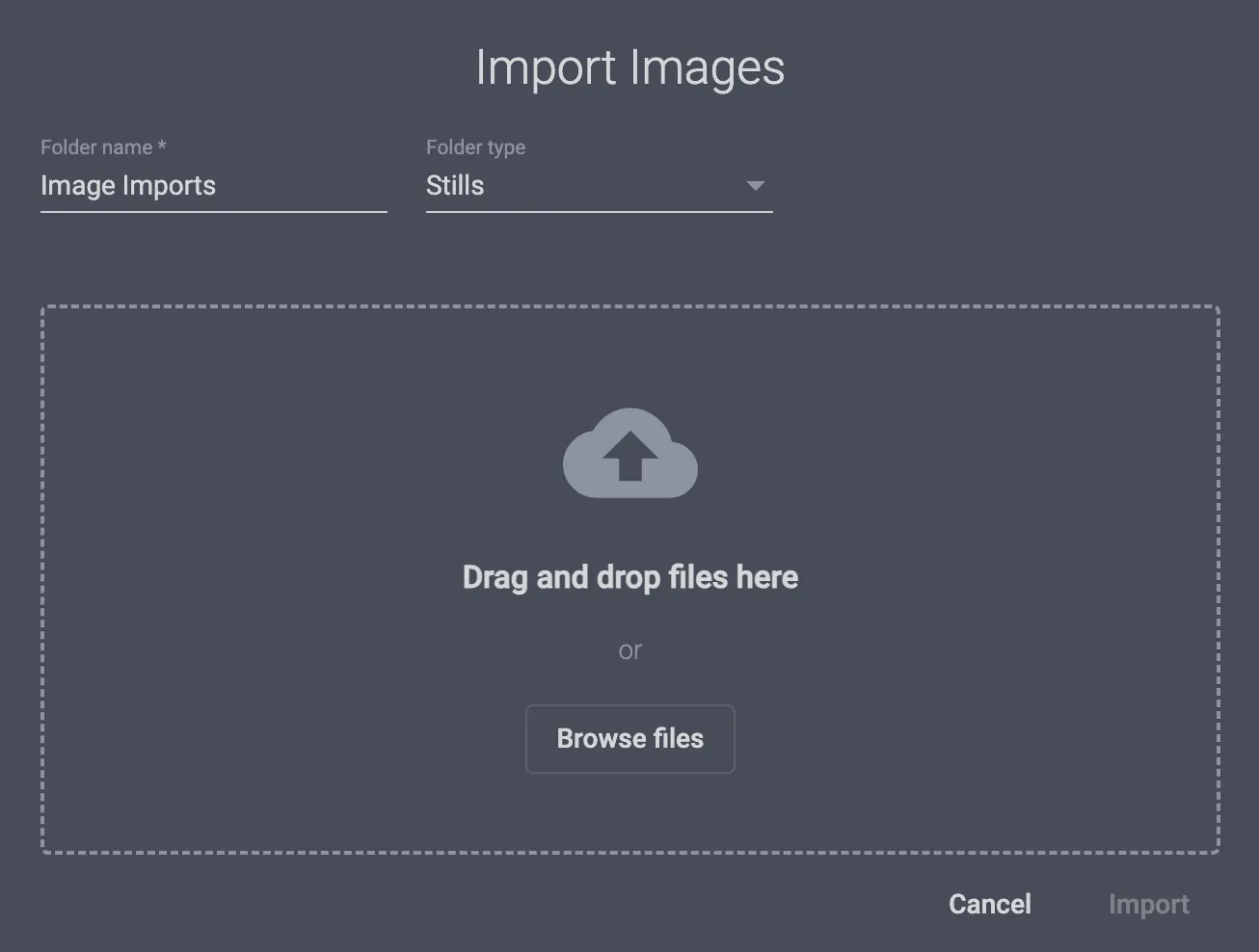
ਚਿੱਤਰਾਂ ਨੂੰ ਆਯਾਤ ਕਰੋ 'ਤੇ ਕਲਿੱਕ ਕਰਨ ਨਾਲ ਇੱਕ ਪੌਪ-ਅੱਪ ਵਿੰਡੋ ਖੁੱਲ੍ਹ ਜਾਵੇਗੀ ਜੋ ਡ੍ਰੈਗ-ਐਂਡ-ਡਰਾਪ ਦੁਆਰਾ, ਜਾਂ ਸਥਾਨਕ ਫਾਈਲਾਂ ਨੂੰ ਬ੍ਰਾਊਜ਼ ਕਰਕੇ ਚਿੱਤਰ ਆਯਾਤ ਨੂੰ ਸਮਰੱਥ ਬਣਾਉਂਦੀ ਹੈ। ਵਿੰਡੋ ਦੇ ਸਿਖਰ 'ਤੇ, ਆਯਾਤ ਕੀਤੇ ਚਿੱਤਰਾਂ ਲਈ ਫੋਲਡਰ ਨਾਮ ਅਤੇ ਫੋਲਡਰ ਕਿਸਮ ਨੂੰ ਕੌਂਫਿਗਰ ਕਰਨਾ ਵੀ ਸੰਭਵ ਹੈ.
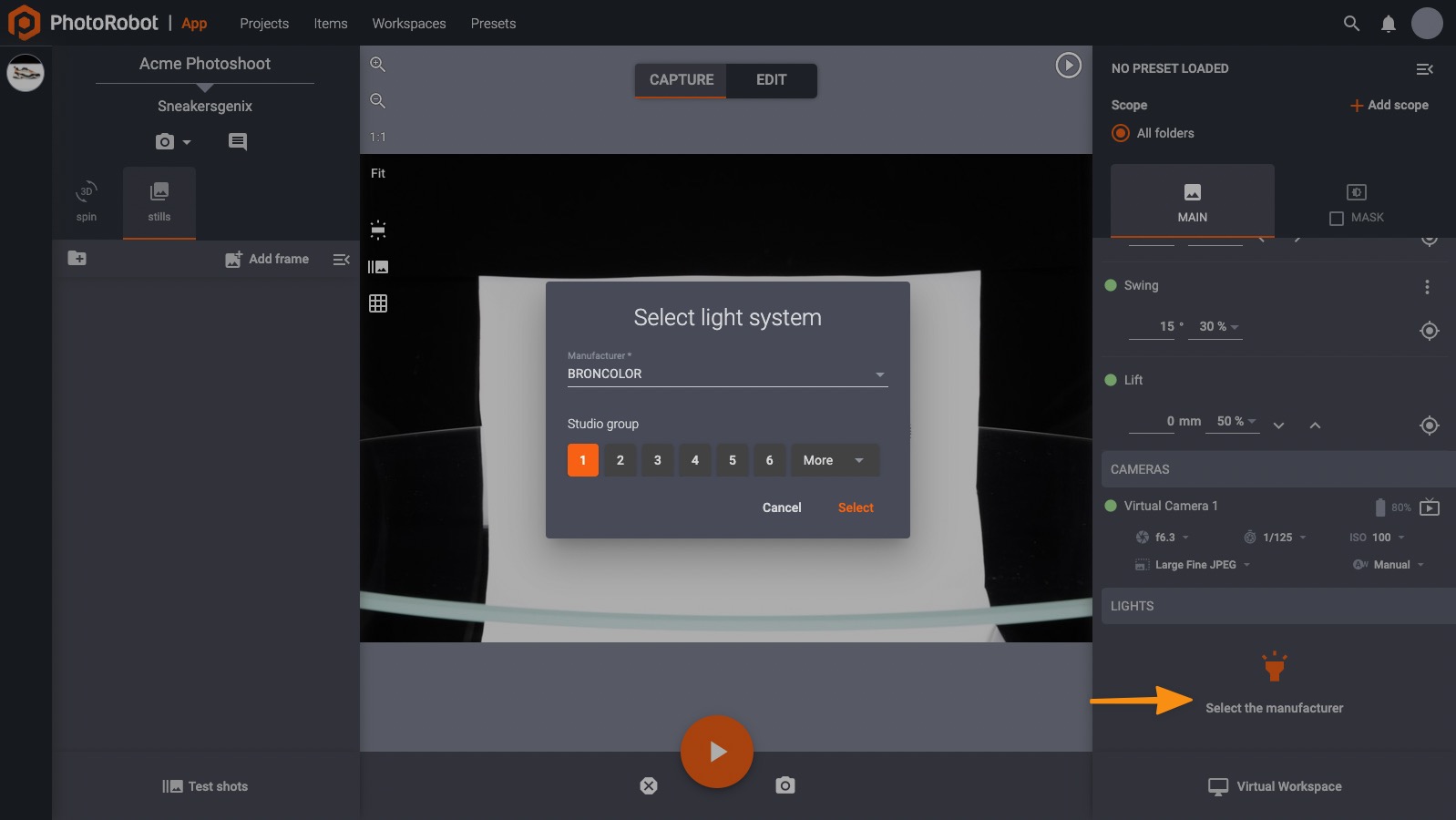
ਅਨੁਕੂਲ ਲਾਈਟਾਂ ਕੰਟਰੋਲ
CAPP ਨਾਲ ਅਨੁਕੂਲ ਲਾਈਟਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ, ਤੁਸੀਂ ਸੰਪਾਦਨ ਮੋਡ ਵਿੰਡੋ ਦੇ ਹੇਠਲੇ ਸੱਜੇ ਕੋਨੇ ਵਿੱਚ ਲਾਈਟਾਂ ਦੀ ਚੋਣ ਕਰਨ ਦੇ ਯੋਗ ਹੁੰਦੇ ਹੋ।
ਕੈਪਚਰ ਮੋਡ ਇੰਟਰਫੇਸ ਸੰਖੇਪਤਾ
ਕੈਪਚਰ ਮੋਡ ਇੰਟਰਫੇਸ ਦੇ ਕੇਂਦਰੀ ਹਿੱਸੇ ਵਿੱਚ ਪੂਰਵਦਰਸ਼ਨ ਵਿੰਡੋ ਸ਼ਾਮਲ ਹੁੰਦੀ ਹੈ, ਜੋ ਕਿ ਜਾਂ ਤਾਂ ਮੌਜੂਦਾ ਚੁਣੀ ਗਈ ਤਸਵੀਰ (ਜੇ ਤੁਸੀਂ ਪਹਿਲਾਂ ਹੀ ਕੁਝ ਲੈ ਚੁੱਕੇ ਹੋ) ਜਾਂ ਕੈਮਰੇ ਤੋਂ ਸਟ੍ਰੀਮ ਕੀਤੀ ਲਾਈਵ ਵਿਊ ਨੂੰ ਦਿਖਾਉਂਦੀ ਹੈ।
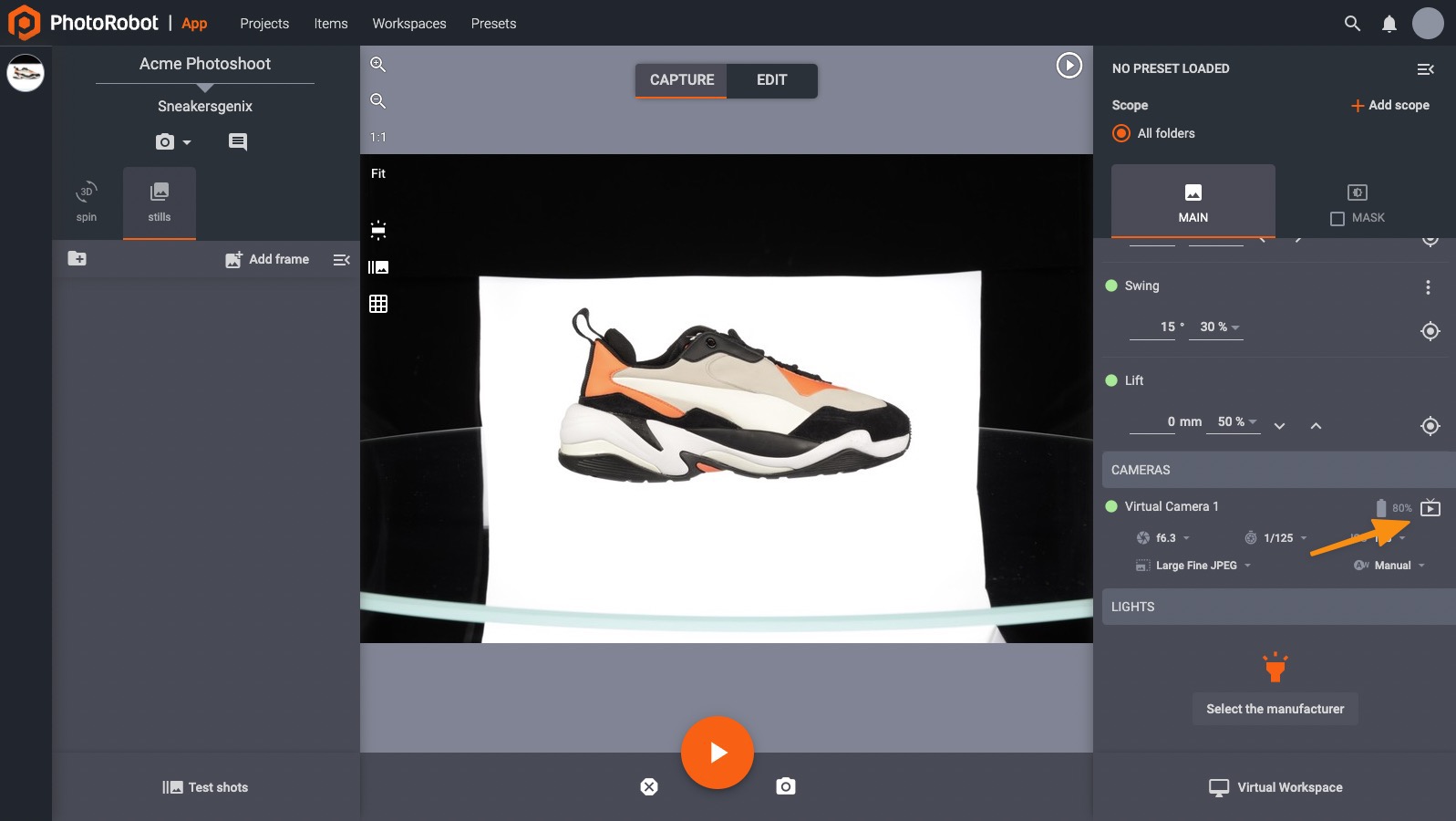
ਲਾਈਵ ਵਿਊ, ਜੋ ਕਿ ਲਾਭਦਾਇਕ ਹੈ ਜੇਕਰ ਤੁਸੀਂ ਸੰਜਮ ਅਤੇ ਫੋਕਸ ਦੀ ਜਾਂਚ ਕਰਨਾ ਚਾਹੁੰਦੇ ਹੋ, ਨੂੰ ਸਕ੍ਰੀਨ ਦੇ ਸੱਜੇ ਪਾਸੇ ਕੰਟਰੋਲ ਬਾਰ ਦੇ ਕੇਂਦਰੀ ਹਿੱਸੇ ਵਿੱਚ ਕੈਮਰਾ ਕੰਟਰੋਲ ਖੇਤਰ ਵਿੱਚ ਟੌਗਲ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
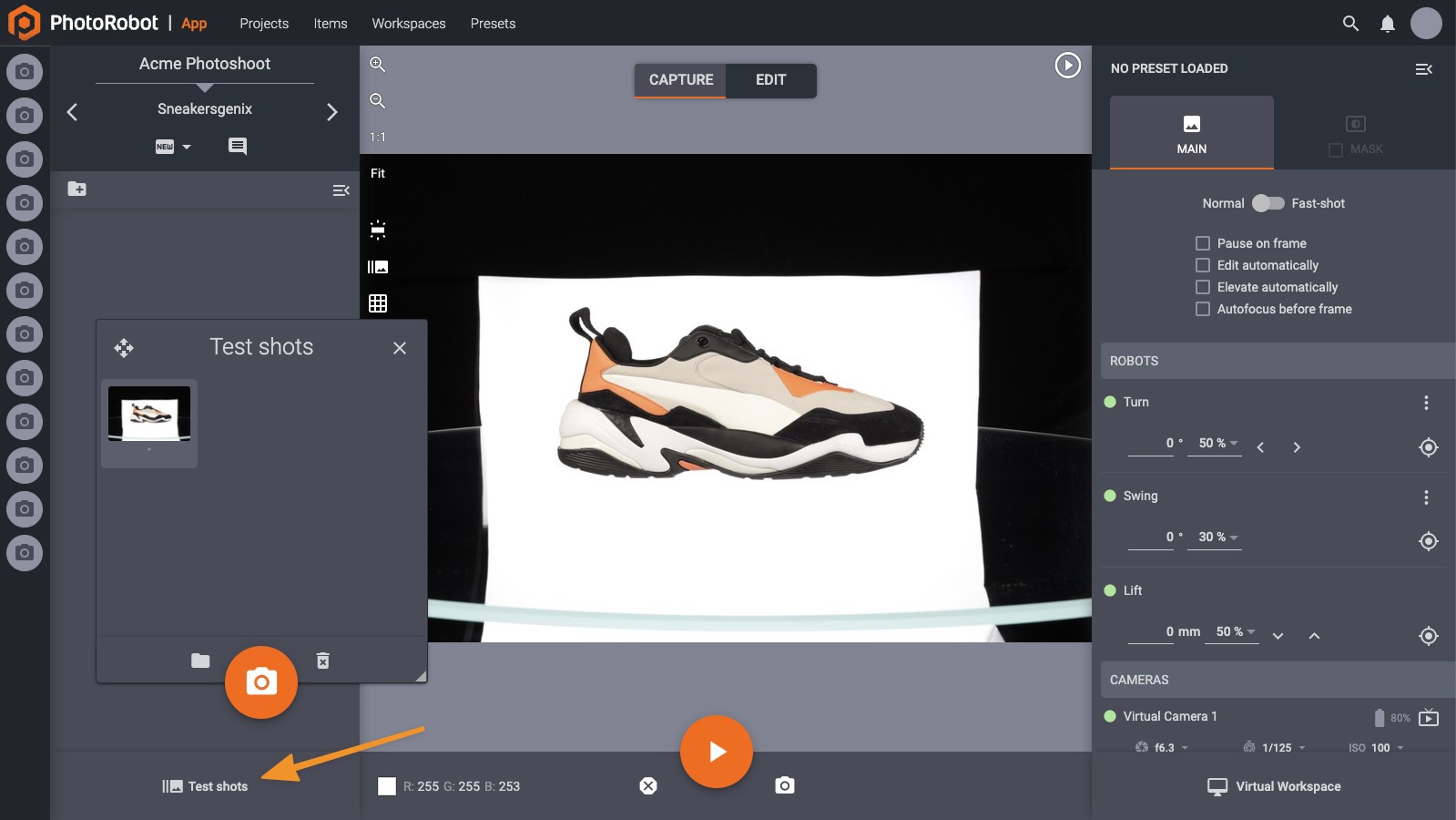
ਟੈਸਟ ਸ਼ਾਟ ਲੈਣਾ
ਅੰਤਿਮ ਤਸਵੀਰਾਂ ਲੈਣ ਤੋਂ ਪਹਿਲਾਂ, ਇੱਕ ਜਾਂ ਵਧੇਰੇ ਟੈਸਟ ਸ਼ਾਟ ਲੈਣਾ ਇੱਕ ਵਧੀਆ ਵਿਚਾਰ ਹੈ। ਅਜਿਹਾ ਕਰਨ ਦਾ ਸਭ ਤੋਂ ਆਸਾਨ ਤਰੀਕਾ ਹੈ ਆਪਣੇ ਕੰਪਿਊਟਰ ਕੀ-ਬੋਰਡ 'ਤੇ T ਕੁੰਜੀ ਨੂੰ ਦਬਾਉਣਾ। ਇਹ ਤੁਹਾਨੂੰ ਇਹ ਜਾਂਚ ਕਰਨ ਵਿੱਚ ਮਦਦ ਕਰੇਗਾ ਕਿ ਕੀ ਤੁਹਾਨੂੰ ਆਪਣੀਆਂ ਲਾਈਟਾਂ, ਕੈਮਰੇ ਆਦਿ ਦੀਆਂ ਸੈਟਿੰਗਾਂ ਨੂੰ ਬਦਲਣਾ ਚਾਹੀਦਾ ਹੈ ਜਾਂ ਨਹੀਂ। ਟੈਸਟ ਚਿੱਤਰਾਂ ਨੂੰ "ਟੈਸਟ ਸ਼ਾਟ" ਫੋਲਡਰ ਵਿੱਚ ਸਟੋਰ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਜਿਸ ਨੂੰ ਤੁਸੀਂ ਸਕ੍ਰੀਨ ਦੇ ਹੇਠਲੇ ਖੱਬੇ ਹਿੱਸੇ ਵਿੱਚ ਐਕਸੈਸ ਕਰ ਸਕਦੇ ਹੋ।
ਫੋਟੋਗਰਾਫੀ ਲੜੀ ਸ਼ੁਰੂ ਕਰਨੀ
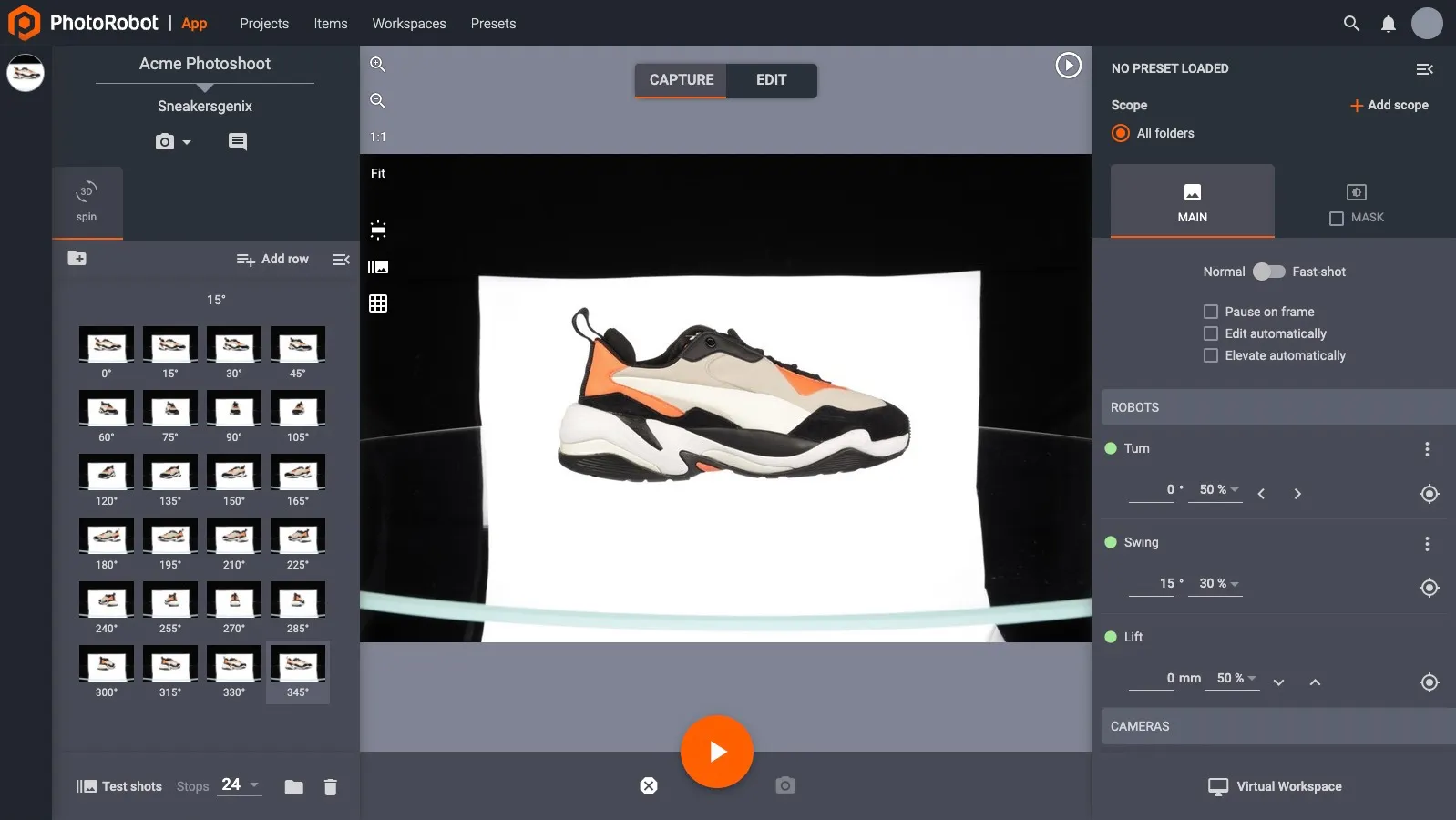
ਜਦੋਂ ਸੈਟਿੰਗਾਂ ਤੋਂ ਸੰਤੁਸ਼ਟ ਹੋ ਜਾਂਦੇ ਹਨ, ਜਿੰਨ੍ਹਾਂ ਦੀ ਪੁਸ਼ਟੀ ਇੱਕ ਟੈਸਟ ਸ਼ਾਟ ਲੈ ਕੇ ਕੀਤੀ ਗਈ ਸੀ, ਤਾਂ ਇਹ ਫੋਟੋਗਰਾਫੀ ਲੜੀ ਨੂੰ ਚਲਾਉਣ ਦਾ ਸਮਾਂ ਹੁੰਦਾ ਹੈ। ਇਸਨੂੰ ਤੁਹਾਡੇ ਕੀ-ਬੋਰਡ 'ਤੇ ਸਪੇਸ ਬਾਰ ਨੂੰ ਦਬਾਕੇ ਜਾਂ ਹੇਠਾਂ ਦਿੱਤੀ ਤਸਵੀਰ ਵਿੱਚ ਦਿਖਾਏ ਗਏ "start" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰਨ ਦੁਆਰਾ ਚਾਲੂ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
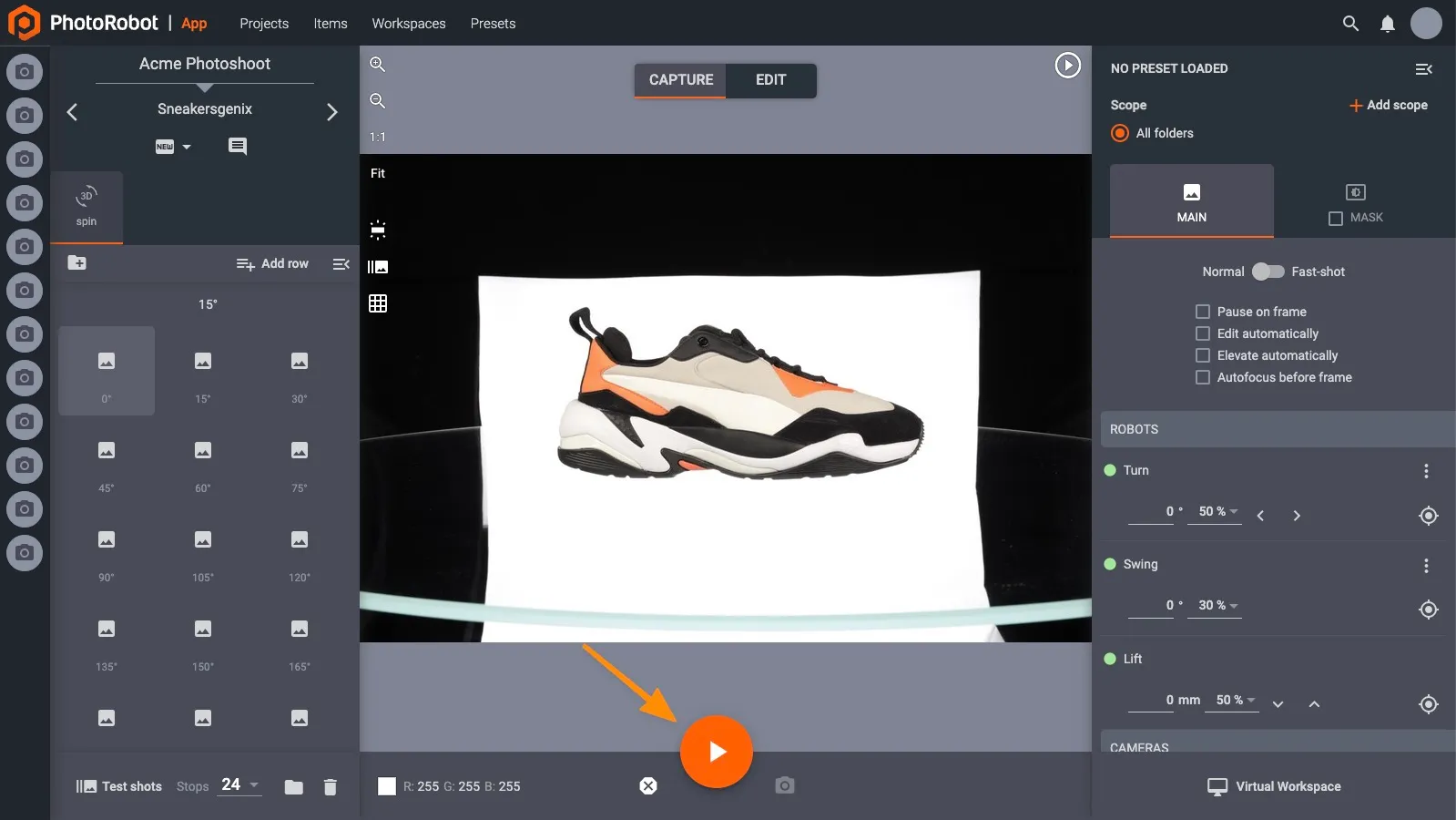
ਜੇ ਤੁਹਾਡੇ ਕੋਲ ਬਾਰਕੋਡ ਸਕੈਨਰ ਹੈ, ਤਾਂ ਤੁਸੀਂ ਇੱਕ ਵਿਸ਼ੇਸ਼ "ਸਟਾਰਟ" ਬਾਰ ਕੋਡ ਨੂੰ ਸਕੈਨ ਕਰਕੇ ਵੀ ਕ੍ਰਮ ਨੂੰ ਚਾਲੂ ਕਰ ਸਕਦੇ ਹੋ। PhotoRobot "ਸਟਾਰਟ" ਬਾਰਕੋਡ ਨੂੰ ਔਨਲਾਈਨ ਡਾਊਨਲੋਡ ਕਰੋ, ਅਤੇ ਇਸ ਵਿਸ਼ੇਸ਼ਤਾ ਦੀ ਵਰਤੋਂ ਕਰਨ ਲਈ ਇਸਨੂੰ ਪ੍ਰਿੰਟ ਆਊਟ ਕਰੋ।

ਤੁਸੀਂ ਜਾਣ ਜਾਵੋਂਗੇ ਕਿ ਲੜੀ ਸਫਲਤਾਪੂਰਵਕ ਸਮਾਪਤ ਹੋ ਗਈ ਹੈ ਜੇਕਰ ਖੱਬੇ ਪਾਸੇ ਦੇ ਸਾਰੇ ਥੰਮਨੇਲਾਂ ਨੂੰ ਚਿੱਤਰਾਂ ਨਾਲ ਭਰ ਦਿੱਤਾ ਗਿਆ ਹੈ। ਸਟ੍ਰੋਬ ਲਾਈਟਾਂ ਦੇ ਕਿਸੇ ਵੀ ਸੰਭਾਵਿਤ ਗਲਤ ਫਾਇਰਾਂ ਵੱਲ ਧਿਆਨ ਦੇਣਾ ਇੱਕ ਵਧੀਆ ਅਭਿਆਸ ਹੈ।
ਜੇ ਕੋਈ ਵੀ ਥੰਬਨੇਲ ਹੋਰਨਾਂ ਦੇ ਮੁਕਾਬਲੇ ਵਧੇਰੇ ਗੂੜ੍ਹੇ ਹਨ, ਤਾਂ ਘੁੰਮਣ ਦੀ ਗਤੀ ਨੂੰ ਘੱਟ ਕਰੋ ਜਾਂ, ਜੇ ਜ਼ਰੂਰੀ ਹੋਵੇ, ਤਾਂ ਆਪਣੀਆਂ ਲਾਈਟਾਂ ਦੀ ਹਾਲਤ ਦੀ ਜਾਂਚ ਕਰੋ। ਫਿਰ ਤੁਸੀਂ ਇਨ੍ਹਾਂ ਚਿੱਤਰਾਂ ਨੂੰ ਚਿੰਨ੍ਹਿਤ ਕਰ ਸਕਦੇ ਹੋ ਅਤੇ ਪੂਰੇ ਕ੍ਰਮ ਨੂੰ ਦੁਬਾਰਾ ਚਲਾਏ ਬਿਨਾਂ ਉਨ੍ਹਾਂ ਨੂੰ ਦੁਬਾਰਾ ਸ਼ੂਟ ਕਰ ਸਕਦੇ ਹੋ।
ਇੱਕ ਵਾਰ ਕੈਪਚਰ ਲੜੀ ਦੇ ਪੂਰਾ ਹੋਣ ਤੋਂ ਬਾਅਦ, ਤੁਸੀਂ ਸੰਪਾਦਨ ਮੋਡ ਵਿੱਚ ਅਦਲਾ-ਬਦਲੀ ਕਰ ਸਕਦੇ ਹੋ, ਜਿੱਥੇ ਤੁਸੀਂ ਪੋਸਟ-ਪ੍ਰੋਸੈਸਿੰਗ ਕਰੋਂਗੇ।
PhotoRobot ਮੈਕਰੋਜ਼
CAPP ਵਿੱਚ ਮੈਕਰੋ ਵਰਤੋਂਕਾਰਾਂ ਨੂੰ ਕਿਸੇ ਆਈਟਮ ਅਤੇ ਇਸਦੇ ਫੋਲਡਰਾਂ (ਸਪਿੱਨ, ਸਟਿੱਲ, ਆਦਿ) ਦੀ ਕੈਪਚਰ ਪ੍ਰਕਿਰਿਆ ਲਈ ਕਮਾਂਡਾਂ ਨੂੰ ਪਰਿਭਾਸ਼ਿਤ ਕਰਨ ਦੇ ਯੋਗ ਬਣਾਉਂਦੇ ਹਨ। ਕਮਾਂਡਾਂ ਵਿਅਕਤੀਗਤ ਜਾਂ ਕਈ ਫੋਲਡਰਾਂ 'ਤੇ ਲਾਗੂ ਹੋ ਸਕਦੀਆਂ ਹਨ, ਕ੍ਰਮਾਂ ਨੂੰ ਚਲਾ ਸਕਦੀਆਂ ਹਨ, ਚਿੱਤਰ ਸੰਪਾਦਨਾਵਾਂ, ਵਰਕਸਪੇਸ, ਪ੍ਰੀ-ਸੈੱਟ, ਕਾਪੀ ਚਿੱਤਰ ਸੈਟਿੰਗਾਂ ਅਤੇ ਮੂਵ ਚਿੱਤਰ ਸੈਟਿੰਗਾਂ 'ਤੇ ਲਾਗੂ ਹੋ ਸਕਦੀਆਂ ਹਨ। ਉਪਭੋਗਤਾ ਮੈਕਰੋ ਨੂੰ ਨਾਮ, ਬਾਰਕੋਡ, ਟੈਗ ਜਾਂ ਨੋਟਸ ਦੁਆਰਾ ਵੀ ਅਨੁਕੂਲਿਤ ਕਰ ਸਕਦੇ ਹਨ।
ਨੋਟ: PhotoRobot ਮੈਕਰੋਜ਼ ਦੀ ਸੰਰਚਨਾ ਅਤੇ ਵਰਤੋਂ ਬਾਰੇ ਵਿਸਤ੍ਰਿਤ ਨਿਰਦੇਸ਼ਾਂ ਲਈ, PhotoRobot ਮੈਕਰੋਜ਼ ਯੂਜ਼ਰ ਗਾਈਡ ਵੇਖੋ। ਜਾਣੋ ਕਿ ਮੈਕਰੋਜ਼ ਕਿਵੇਂ ਕਈ ਫੋਲਡਰਾਂ ਅਤੇ ਕੰਪੋਨੈਂਟਾਂ ਵਿੱਚ ਫੋਟੋਗ੍ਰਾਫੀ ਆਟੋਮੇਸ਼ਨ ਜਾਦੂ ਨੂੰ ਸਮਰੱਥ ਬਣਾਉਂਦੇ ਹਨ, ਗੁੰਝਲਦਾਰ ਕਾਰਜਾਂ ਦੀ ਆਟੋਮੈਟਿਕ ਪ੍ਰੋਸੈਸਿੰਗ ਦੇ ਨਾਲ।
PhotoRobot Wizards ਮੋਡ
CAPP ਵਿੱਚ Wizards mode ਮੈਨੂਅਲ ਹਾਰਡਵੇਅਰ, ਕੈਮਰਾ, ਅਤੇ ਕ੍ਰਮ ਸੰਰਚਨਾ ਦੇ ਵਿਕਲਪ ਵਜੋਂ ਕੰਮ ਕਰਦਾ ਹੈ। ਵਰਤੋਂ ਵਿੱਚ, Wizards mode ਇੱਕ ਪ੍ਰਸ਼ਾਸਕ ਜਾਂ ਫੋਟੋਗ੍ਰਾਫਰ ਨੂੰ ਉਤਪਾਦਨ-ਲਾਈਨ ਆਪਰੇਟਰਾਂ ਲਈ ਕੈਪਚਰ ਮੋਡ ਨੂੰ ਸਰਲ ਬਣਾਉਣ ਲਈ ਵੱਖ-ਵੱਖ Wizards ਬਣਾਉਣ ਦੇ ਯੋਗ ਬਣਾਉਂਦਾ ਹੈ। ਇੱਕ ਆਪਰੇਟਰ ਫਿਰ Wizards mode ਵਿੱਚ CAPP ਸ਼ੁਰੂ ਕਰਨ ਦੇ ਯੋਗ ਹੁੰਦਾ ਹੈ, ਜੋ ਵਿਜ਼ਾਰਡ-ਗਾਈਡਡ ਕਦਮਾਂ ਦੇ ਨਾਲ ਇੱਕ ਬਹੁਤ ਹੀ ਸਧਾਰਨ ਇੰਟਰਫੇਸ ਵਜੋਂ ਕੰਮ ਕਰਦਾ ਹੈ। ਵਰਤੋਂ ਵਿੱਚ ਆਸਾਨੀ ਅਤੇ ਆਨਬੋਰਡਿੰਗ ਲਈ ਸੀਮਤ ਨਿਯੰਤਰਣ ਵੀ ਹਨ।
ਇੱਕ ਵਿਜ਼ਾਰਡ ਬਣਾਉਣ ਤੋਂ ਬਾਅਦ, ਇਹ ਪ੍ਰੀਸੈੱਟਸ ਅਤੇ ਵਰਕਸਪੇਸ ਕੌਂਫਿਗਰੇਸ਼ਨਾਂ, ਦੇ ਨਾਲ-ਨਾਲ ਪੂਰਵ-ਪ੍ਰਭਾਸ਼ਿਤ ਕਦਮਾਂ ਨੂੰ ਸਟੋਰ ਕਰਦਾ ਹੈ ਜਿਨ੍ਹਾਂ ਦੀ ਪਾਲਣਾ ਆਪਰੇਟਰਾਂ ਨੂੰ ਕਰਨੀ ਚਾਹੀਦੀ ਹੈ। ਆਪਰੇਟਰ ਕੋਈ ਵੀ ਸੈਟਿੰਗਾਂ ਨੂੰ ਅਡਜਸਟ ਨਹੀਂ ਕਰ ਸਕਦੇ, ਅਤੇ ਉਹਨਾਂ ਨੂੰ ਅਗਲੀ ਪ੍ਰਕਿਰਿਆ 'ਤੇ ਜਾਣ ਤੋਂ ਪਹਿਲਾਂ ਹਰੇਕ ਕਦਮ ਵਿੱਚ ਦਿੱਤੀਆਂ ਹਦਾਇਤਾਂ ਨੂੰ ਪੂਰਾ ਕਰਨਾ ਚਾਹੀਦਾ ਹੈ।
ਨੋਟ: ਵਿਜ਼ਾਰਡ ਸਟੈਪਸ ਨੂੰ ਇੱਕ JavaScript-ਵਰਗੇ ਭਾਸ਼ਾ ਫਾਰਮੈਟ ਵਿੱਚ ਪਰਿਭਾਸ਼ਿਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਕਸਟਮ ਕਾਰਜਕੁਸ਼ਲਤਾ ਲਈ PhotoRobot ਸਲਾਹਕਾਰਾਂ ਦੁਆਰਾ ਸਕ੍ਰਿਪਟ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਉਪਭੋਗਤਾ ਸ਼ੁਰੂਆਤੀ ਪ੍ਰਯੋਗਾਂ ਜਾਂ ਸਧਾਰਨ ਸੈੱਟਅੱਪਾਂ ਲਈ ਬੁਨਿਆਦੀ ਫੰਕਸ਼ਨਾਂ ਨੂੰ ਵੀ ਸਕ੍ਰਿਪਟ ਕਰ ਸਕਦੇ ਹਨ। ਵਿਜ਼ਾਰਡਾਂ ਦੀ ਤਕਨੀਕੀ ਸੰਰਚਨਾ ਅਤੇ ਆਪਰੇਟਰ ਵਰਤੋਂ ਬਾਰੇ ਦਸਤਾਵੇਜ਼ਾਂ ਲਈ, PhotoRobot ਵਿਜ਼ਾਰਡ ਮੋਡ ਯੂਜ਼ਰ ਮੈਨੂਅਲ ਵੇਖੋ।
ਮੋਡ ਇੰਟਰਫੇਸ ਸੋਧ
ਸਕ੍ਰੀਨ ਦੇ ਸੱਜੇ ਪਾਸੇ, ਤੁਸੀਂ ਕਿਸੇ ਵੀ ਸੰਖਿਆ ਵਿੱਚ ਸੰਪਾਦਨ ਕਾਰਵਾਈਆਂ ਨੂੰ ਜੋੜ ਸਕਦੇ ਹੋ:
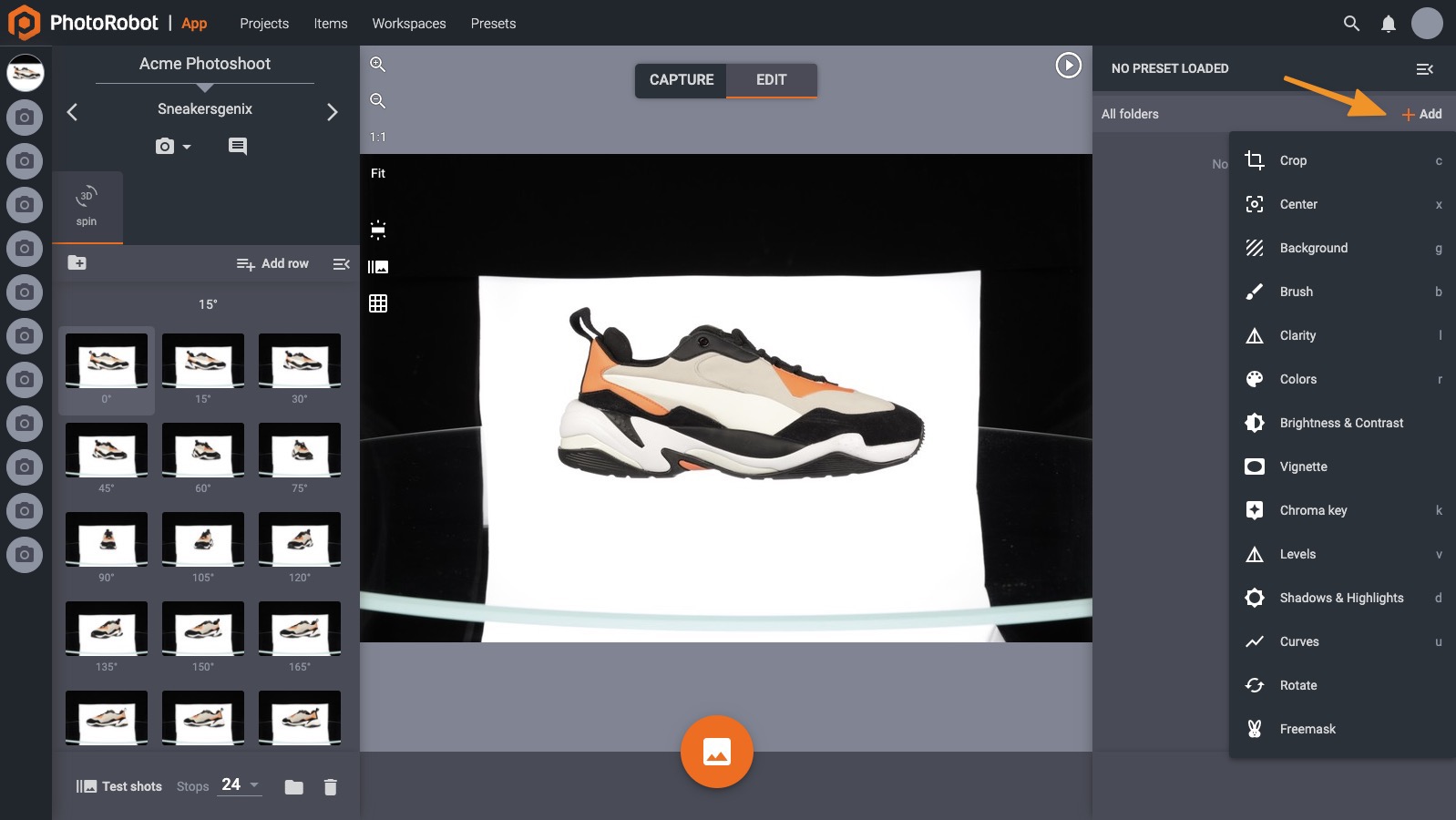
ਕੁਝ ਸਭ ਤੋਂ ਆਮ ਸੰਪਾਦਨ ਕਾਰਵਾਈਆਂ ਨੂੰ ਸਿਖਰ ਤੇ ਸੂਚੀਬੱਧ ਕੀਤਾ ਗਿਆ ਹੈ: ਫਸਲ, ਕੇਂਦਰ ਅਤੇ ਪਿਛੋਕੜ।
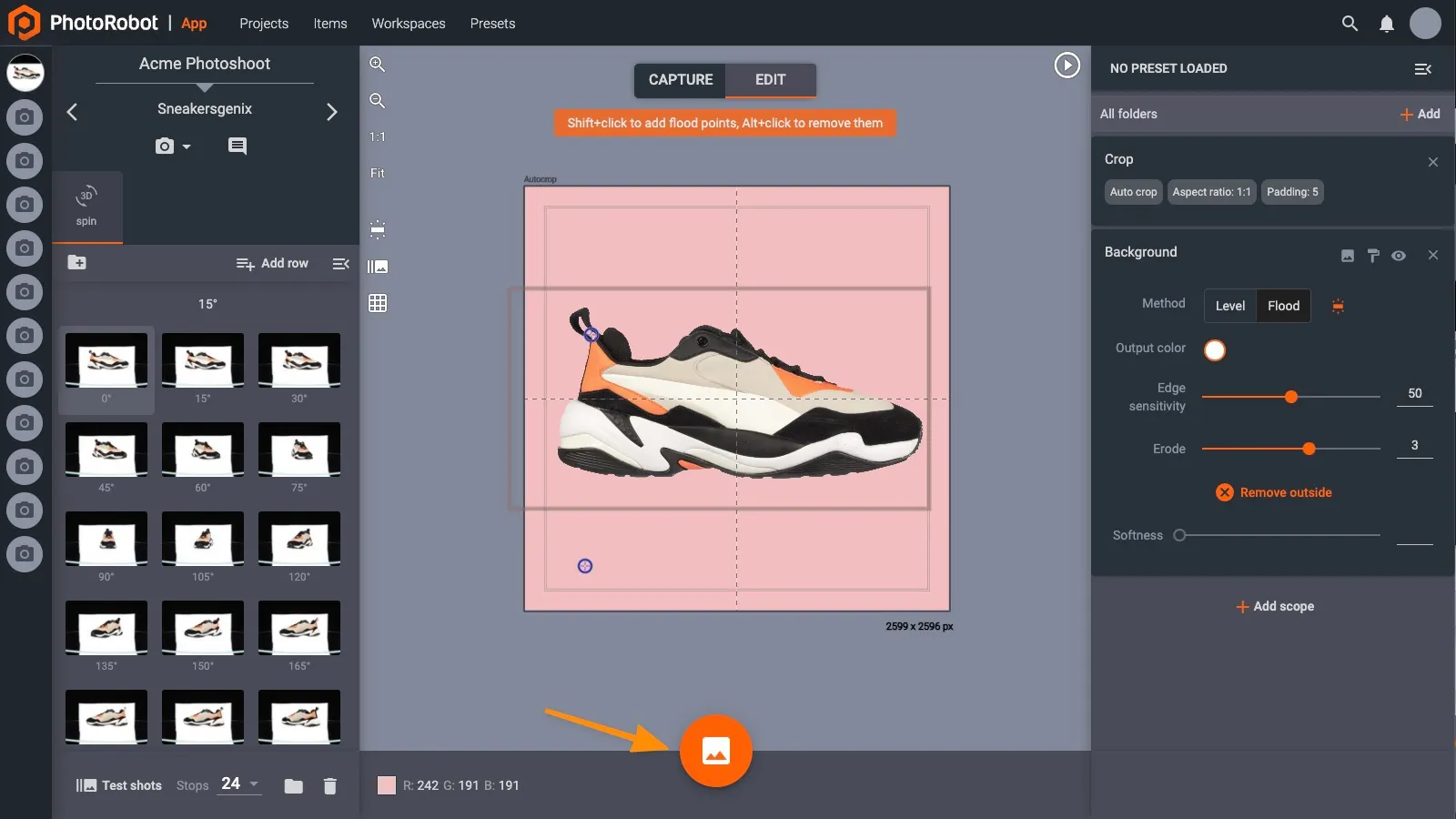
ਆਟੋਮੈਟਿਕ ਕਰੋਪ
ਫਸਲ - ਚਿੱਤਰਾਂ ਨੂੰ ਕ੍ਰੋਪ ਕਰਦੇ ਸਮੇਂ, ਤਿੰਨ ਮੁੱਖ ਨਿਯੰਤਰਣ ਹੁੰਦੇ ਹਨ: ਆਟੋਮੈਟਿਕ ਕ੍ਰੋਪਿੰਗ ਲਈ ਟੌਗਲਜ਼, ਆਸਪੈਕਟ ਅਨੁਪਾਤ, ਅਤੇ ਪੈਡਿੰਗ (ਜੋ ਇਹ ਨਿਯੰਤਰਿਤ ਕਰਦਾ ਹੈ ਕਿ ਫੋਟੋ ਵਾਲੀ ਵਸਤੂ ਦੇ ਆਲੇ-ਦੁਆਲੇ ਕਿੰਨੀ ਥਾਂ ਹੈ)।

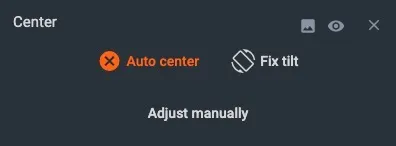
ਆਟੋ ਸੈਂਟਰ
ਕੇਂਦਰ - ਹਾਲਾਂਕਿ ਜ਼ਿਆਦਾਤਰ PhotoRobot ਮਸ਼ੀਨਾਂ ਲੇਜ਼ਰ ਨਾਲ ਲੈਸ ਹੁੰਦੀਆਂ ਹਨ ਜੋ ਸਤਹ 'ਤੇ ਵਸਤੂਆਂ ਨੂੰ ਸਥਿਤੀ ਵਿੱਚ ਲਿਆਉਣ ਵਿੱਚ ਮਦਦ ਕਰਦੀਆਂ ਹਨ, ਪਰ ਜ਼ਿਆਦਾਤਰ ਤਸਵੀਰਾਂ ਨੂੰ ਵਾਧੂ ਸਾਫਟਵੇਅਰ ਸੈਂਟਰਿੰਗ ਦੀ ਲੋੜ ਪਵੇਗੀ। ਇਹ ਖਾਸ ਕਰਕੇ 360° ਸਪਿਨਾਂ ਲਈ ਮਹੱਤਵਪੂਰਨ ਹੈ। ਸ਼ੁਰੂ ਕਰਨ ਵੇਲੇ, "ਆਟੋ ਸੈਂਟਰ" ਫੰਕਸ਼ਨ ਨੂੰ ਚਾਲੂ ਰੱਖਣ ਦੀ ਸਿਫ਼ਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਜਿਵੇਂ ਕਿ ਹੇਠਾਂ ਦਿੱਤੀ ਤਸਵੀਰ ਵਿੱਚ ਦੇਖਿਆ ਗਿਆ ਹੈ:
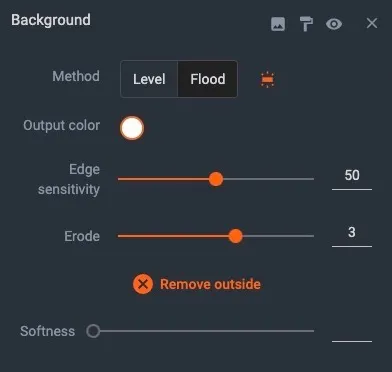
ਬੈਕਗਰਾਊਂਡ ਹਟਾਉਣੀ
ਬੈਕਗ੍ਰਾਉਂਡ ਆਪਰੇਸ਼ਨ ਕਿਸੇ ਚਿੱਤਰ ਜਾਂ ਚਿੱਤਰ ਸੈੱਟ ਦੇ ਪਿਛੋਕੜ ਨੂੰ ਐਡਜਸਟ ਕਰੇਗਾ, ਜੇ ਚਾਹੇ ਤਾਂ ਬੈਕਗ੍ਰਾਉਂਡ ਨੂੰ ਪੂਰੀ ਤਰ੍ਹਾਂ ਹਟਾ ਦੇਵੇਗਾ। CAPP ਵਿੱਚ ਤਿੰਨ ਵੱਖ-ਵੱਖ ਪਿਛੋਕੜ ਹਟਾਉਣ ਦੇ ਤਰੀਕਿਆਂ ਦੁਆਰਾ ਵੱਖਰੇ ਨਤੀਜੇ ਪ੍ਰਾਪਤ ਕੀਤੇ ਜਾ ਸਕਦੇ ਹਨ। ਪੱਧਰ ਦੁਆਰਾ ਪਿਛੋਕੜ ਨੂੰ ਹਟਾਇਆ ਜਾਂਦਾ ਹੈ, ਹੜ੍ਹ ਦੁਆਰਾ ਪਿਛੋਕੜ ਨੂੰ ਹਟਾਇਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਫ੍ਰੀਮਾਸਕਿੰਗ ਦੁਆਰਾ.
- ਪੱਧਰ ਦੁਆਰਾ ਪਿਛੋਕੜ ਹਟਾਉਣਾ ਪਿਛੋਕੜ ਅਤੇ ਫੋਰਗ੍ਰਾਊਂਡ ਦੀ ਪਛਾਣ ਕਰਨ ਲਈ RGB ਰੰਗ ਪੱਧਰਾਂ ਅਤੇ ਚਮਕ ਮੁੱਲਾਂ ਦੇ ਸਾੱਫਟਵੇਅਰ ਵਿਸ਼ਲੇਸ਼ਣ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ। ਚਮਕਦਾਰ ਜਾਂ ਚਿੱਟੇ ਆਈਟਮਾਂ ਦੀ ਫੋਟੋ ਖਿੱਚਦੇ ਸਮੇਂ, ਅਤੇ ਚਿੱਟੇ ਪਿਛੋਕੜ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ ਇਹ ਲਾਭਦਾਇਕ ਹੁੰਦਾ ਹੈ. ਪਿਛੋਕੜ ਦੀ ਚਮਕ ਨੂੰ ਤੀਬਰਤਾ ਵਿੱਚ ਉੱਚਾ ਬਣਾਉਣ ਲਈ ਸਾੱਫਟਵੇਅਰ ਵਿੱਚ ਪੱਧਰਾਂ ਨੂੰ ਅਨੁਕੂਲ ਕਰੋ ਜਦੋਂ ਤੱਕ ਇਹ ਸ਼ੁੱਧ ਚਿੱਟਾ ਨਹੀਂ ਹੋ ਜਾਂਦਾ। ਫਿਰ ਪਿਛੋਕੜ ਨੂੰ ਪਾਰਦਰਸ਼ੀ ਬਣਾਉਣਾ, ਜਾਂ ਵੱਖ-ਵੱਖ ਰੰਗ ਪਿਛੋਕੜਾਂ ਵਿੱਚ ਸਵੈਪ ਕਰਨਾ ਸੰਭਵ ਹੈ.
- ਹੜ੍ਹ ਦੁਆਰਾ ਪਿਛੋਕੜ ਹਟਾਉਣਾ ਉਪ-ਪੱਧਰੀ ਪਿਛੋਕੜ ਹਟਾਉਣ ਦੇ ਸਮਾਨ ਸਿਧਾਂਤਾਂ ਦੁਆਰਾ ਕੰਮ ਕਰਦਾ ਹੈ, ਅਤੇ ਅਕਸਰ ਗੂੜ੍ਹੀਆਂ ਚੀਜ਼ਾਂ ਦੀ ਫੋਟੋ ਖਿੱਚਣ ਵੇਲੇ ਲਾਭਦਾਇਕ ਹੁੰਦਾ ਹੈ. ਹੜ੍ਹ ਦੀ ਕਾਰਵਾਈ ਦੁਆਰਾ ਪਿਛੋਕੜ ਨੂੰ ਹਟਾਉਣਾ ਪਿਛੋਕੜ ਦੀ ਚਮਕ ਨੂੰ ਹੋਰ ਤੀਬਰ ਬਣਾਉਂਦਾ ਹੈ ਜਦੋਂ ਤੱਕ ਕਿ ਇਹ ਆਈਟਮ ਦੇ ਆਲੇ ਦੁਆਲੇ ਸ਼ੁੱਧ ਚਿੱਟਾ ਨਹੀਂ ਹੋ ਜਾਂਦਾ. ਹਾਲਾਂਕਿ, ਪੱਧਰਾਂ ਨੂੰ ਐਡਜਸਟ ਕਰਨ ਦੀ ਬਜਾਏ, ਟੂਲ ਪਿਛੋਕੜ ਦੀ ਪਛਾਣ ਕਰਨ ਲਈ ਇੱਕ ਚੁਣੇ ਹੋਏ ਬਿੰਦੂ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ ਅਤੇ ਫਿਰ ਉਸ ਖੇਤਰ ਨੂੰ "ਹੜ੍ਹ" ਕਰਦਾ ਹੈ. ਉਪਭੋਗਤਾ ਸਿਰਫ ਫੋਟੋ ਖਿੱਚਣ ਵਾਲੀ ਵਸਤੂ ਦੇ ਬਾਹਰ ਇੱਕ ਬਿੰਦੂ 'ਤੇ ਕਲਿੱਕ ਕਰਦੇ ਹਨ। ਸਾੱਫਟਵੇਅਰ ਫਿਰ ਵਸਤੂ ਦੇ ਕਿਨਾਰਿਆਂ ਦਾ ਪਤਾ ਲਗਾਉਂਦਾ ਹੈ, ਅਤੇ ਇਸ ਦੇ ਆਲੇ ਦੁਆਲੇ ਉਪਲਬਧ ਜਗ੍ਹਾ ਨੂੰ ਭਰਨ ਲਈ ਹੜ੍ਹ ਲਾਗੂ ਕਰਦਾ ਹੈ.
- ਫ੍ਰੀਮਾਸਕਿੰਗ ਪਿਛੋਕੜ ਹਟਾਉਣ ਲਈ ਪੱਧਰਾਂ ਜਾਂ ਹੜ੍ਹ ਦੀ ਵਰਤੋਂ ਕਰਨ ਨਾਲੋਂ ਵਧੇਰੇ ਸੰਰਚਨਾ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ, ਪਰ ਇਹ ਸਭ ਤੋਂ ਸਟੀਕ ਅਤੇ ਤੇਜ਼ ਤਰੀਕਿਆਂ ਵਿੱਚੋਂ ਇੱਕ ਹੋ ਸਕਦਾ ਹੈ. ਇਹ ਵਿਧੀ ਇੱਕ ਕੱਟ-ਆਊਟ ਮਾਸਕ ਚਿੱਤਰ ਅਤੇ ਉਤਪਾਦ ਦੀ ਇੱਕ ਮੁੱਖ ਤਸਵੀਰ ਦੀ ਵਰਤੋਂ ਕਰਦੀ ਹੈ, ਜੋ ਪਿਛੋਕੜ ਨੂੰ ਹਟਾਉਣ ਲਈ ਦੋ ਚਿੱਤਰਾਂ ਨੂੰ ਕੰਪੋਜ਼ਿਟ ਕਰਦੀ ਹੈ. ਕਈ ਵਾਰ, ਇਹ ਵਧੇਰੇ "ਮੁਸ਼ਕਲ" ਵਸਤੂਆਂ ਦੇ ਆਲੇ ਦੁਆਲੇ ਦੇ ਪਿਛੋਕੜ ਨੂੰ ਹਟਾਉਣ ਦਾ ਇਕੋ ਇਕ ਕੁਸ਼ਲ ਤਰੀਕਾ ਹੁੰਦਾ ਹੈ. ਉਦਾਹਰਣ ਵਜੋਂ ਪ੍ਰਤੀਬਿੰਬਤ ਚੀਜ਼ਾਂ, ਜਾਂ ਵਸਤੂਆਂ ਨੂੰ ਲਓ ਜਿੰਨ੍ਹਾਂ ਵਿੱਚ ਖਾਲੀ ਥਾਂ ਵਾਲੇ ਖੇਤਰ ਹੁੰਦੇ ਹਨ। ਫ੍ਰੀਮਾਸਕਿੰਗ ਆਬਜੈਕਟ ਬਨਾਮ ਸਾਰੀ ਖਾਲੀ ਜਗ੍ਹਾ ਦੀ ਪਛਾਣ ਕਰਦੀ ਹੈ, ਜਦੋਂ ਕਿ ਆਈਟਮ ਦੇ ਆਲੇ-ਦੁਆਲੇ ਦੇ ਪਿਛੋਕੜ ਨੂੰ ਹਟਾਉਂਦਾ ਹੈ ਅਤੇ ਜੇ ਜ਼ਰੂਰੀ ਹੋਵੇ ਤਾਂ ਇਸ ਦੇ ਅੰਦਰ. ਹਾਲਾਂਕਿ ਇਸ ਵਿਧੀ ਨੂੰ ਪਿਛੋਕੜ ਹਟਾਉਣ ਲਈ ਮੁੱਖ ਅਤੇ ਮਾਸਕ ਚਿੱਤਰਾਂ ਨੂੰ ਬਣਾਉਣ ਲਈ ਸਟੂਡੀਓ ਲਾਈਟਾਂ ਦੀ ਵਾਧੂ ਸੰਰਚਨਾ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ.
ਨੋਟ: ਯਾਦ ਰੱਖੋ ਕਿ ਸੀਏਪੀਪੀ ਪਿਛੋਕੜ ਨੂੰ ਹਟਾਉਣ ਦੇ ਯੋਗ ਹੋਵੇਗਾ ਜਾਂ ਨਹੀਂ, ਇਹ ਮੁੱਖ ਤੌਰ 'ਤੇ ਇਸ ਗੱਲ 'ਤੇ ਨਿਰਭਰ ਕਰਦਾ ਹੈ ਕਿ ਦ੍ਰਿਸ਼ ਕਿਵੇਂ ਰੌਸ਼ਨ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਜੇ ਤੁਸੀਂ ਅਜਿਹੀਆਂ ਸੈਟਿੰਗਾਂ ਲੱਭਣ ਵਿੱਚ ਅਸਮਰੱਥ ਹੋ ਜੋ ਸੰਤੁਸ਼ਟੀ ਲਈ ਕੰਮ ਕਰਦੀਆਂ ਹਨ, ਤਾਂ ਚਿੱਤਰਾਂ ਨੂੰ ਵੱਖ-ਵੱਖ ਰੋਸ਼ਨੀ ਸੈਟਿੰਗਾਂ ਨਾਲ ਦੁਬਾਰਾ ਸ਼ੂਟ ਕਰੋ।
ਜਦੋਂ ਤੁਸੀਂ ਆਪਣੀਆਂ ਸੰਪਾਦਨ ਸੈਟਿੰਗਾਂ ਤੋਂ ਸੰਤੁਸ਼ਟ ਹੁੰਦੇ ਹੋ, ਤਾਂ "ਲਾਗੂ ਕਰੋ" ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰਕੇ ਪੈਰਾਮੀਟਰਾਂ ਨੂੰ ਲਾਗੂ ਕਰੋ, ਜਿੱਥੇ ਪਹਿਲਾਂ "ਸਟਾਰਟ" ਬਟਨ ਦਿਖਾਈ ਦਿੰਦਾ ਸੀ।
ਚਿੱਤਰ ਪਬਲਿਸ਼ ਕੀਤੇ ਜਾ ਰਹੇ ਹਨ
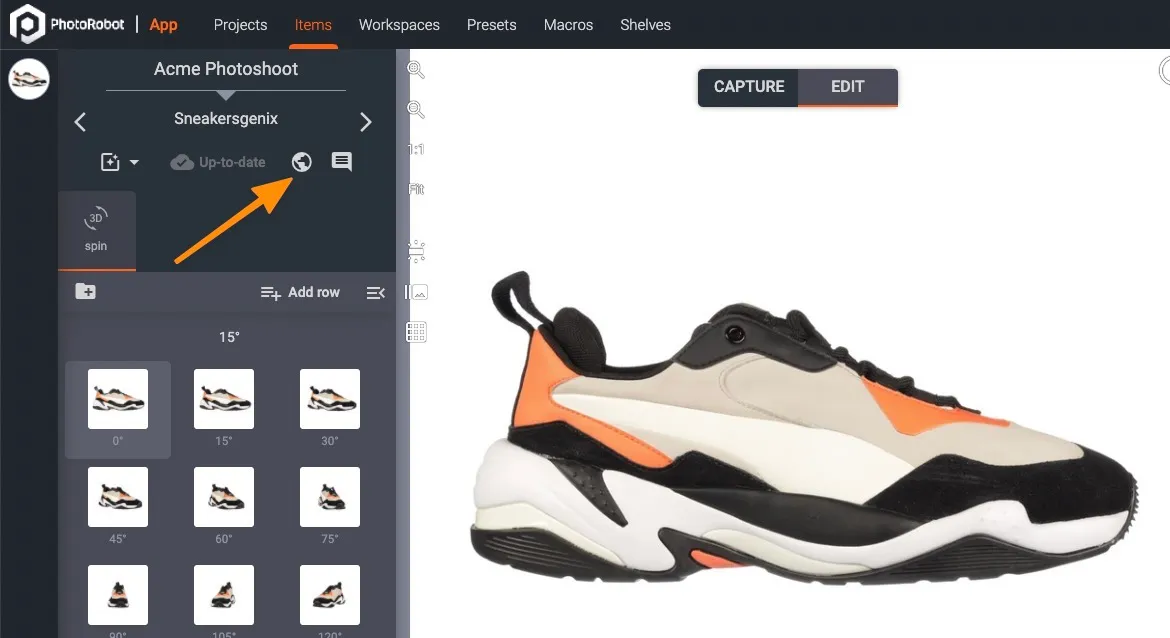
ਇੱਕ ਵਾਰ ਜਦੋਂ ਪ੍ਰਗਤੀ ਬਾਰ ਆਪਣੇ ਅੰਤ 'ਤੇ ਪਹੁੰਚ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਤੁਹਾਡੇ ਸੰਪਾਦਨਾਂ ਨੂੰ ਸਫਲਤਾਪੂਰਵਕ ਤੁਹਾਡੇ ਚਿੱਤਰਾਂ 'ਤੇ ਲਾਗੂ ਕਰ ਦਿੱਤਾ ਜਾਂਦਾ ਹੈ। ਜੇਕਰ ਤੁਸੀਂ ਕਲਾਉਡ ਸੇਵਾਵਾਂ PhotoRobot ਕੀਤੇ ਬਿਨਾਂ CAPP ਦੀ ਵਰਤੋਂ ਕਰ ਰਹੇ ਹੋ, ਤਾਂ ਤੁਹਾਡੇ ਨਤੀਜੇ ਵਜੋਂ ਆਉਣ ਵਾਲੇ ਚਿੱਤਰ ਤੁਹਾਡੀ ਸਥਾਨਕ ਡਰਾਈਵ 'ਤੇ ਫੋਲਡਰ ਢਾਂਚੇ ਵਿੱਚ ਸਟੋਰ ਕੀਤੇ ਜਾਂਦੇ ਹਨ।
ਜੇਕਰ PhotoRobot Cloud ਹੋਸਟਿੰਗ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾ ਰਹੀ ਹੈ, ਤਾਂ ਫ਼ਾਈਲਾਂ ਨੂੰ PhotoRobot ਕਲਾਉਡ ਸਟੋਰੇਜ ਵਿੱਚ ਵੀ ਲੱਭਿਆ ਜਾ ਸਕਦਾ ਹੈ। ਇਹਨਾਂ ਨੂੰ ਐਕਸੈਸ ਕਰਨ ਲਈ, ਸਕ੍ਰੀਨ ਦੇ ਉੱਪਰ-ਖੱਬੇ ਹਿੱਸੇ 'ਤੇ ਫੋਟੋਆਂ ਸੈਕਸ਼ਨ ਵਿੱਚ Cloud ਵਿੱਚ ਖੋਲ੍ਹੋ 'ਤੇ ਕਲਿੱਕ ਕਰੋ।
ਚਿੱਤਰ ਐਕਸਪੋਰਟ ਕੀਤੇ ਜਾ ਰਹੇ ਹਨ
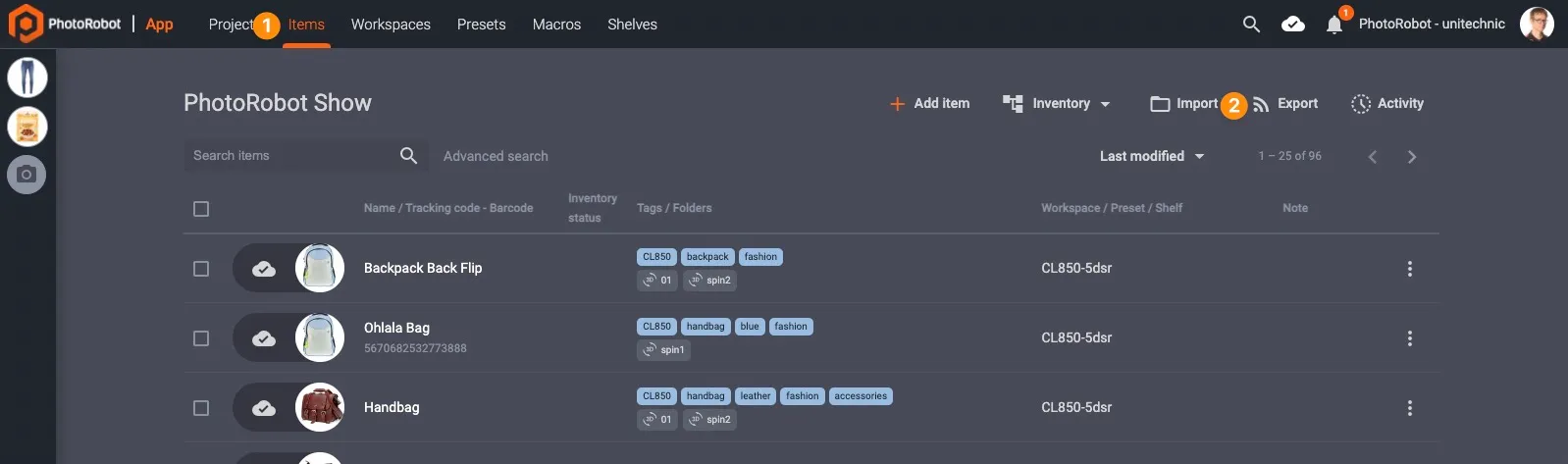
CAPP ਤੋਂ ਆਈਟਮ ਨਿਰਯਾਤ ਕਰਨ ਲਈ, ਵਰਤੋਂਕਾਰ ਸਥਾਨਕ ਡਿਸਕ 'ਤੇ ਨਿਰਯਾਤ ਕਰ ਸਕਦੇ ਹਨ, ਜਾਂ PhotoRobot Cloud ਨੂੰ ਨਿਰਯਾਤ ਕਰ ਸਕਦੇ ਹਨ। ਆਈਟਮ ਨਿਰਯਾਤ ਕਸਟਮ ਨਾਮਕਰਨ ਕਨਵੈਨਸ਼ਨਾਂ ਨਾਲ ਆਈਟਮਾਂ ਨੂੰ ਪਰਿਭਾਸ਼ਿਤ ਕਰਨਾ, ਚਿੱਤਰ ਫਾਰਮੈਟ, ਰੈਜ਼ੋਲੂਸ਼ਨ ਅਤੇ ਵੱਖ-ਵੱਖ ਫਾਇਲਨਾਮ ਟੈਂਪਲੇਟ ਵੇਰੀਏਬਲਾਂ ਨੂੰ ਨਿਰਧਾਰਿਤ ਕਰਨਾ ਸੰਭਵ ਬਣਾਉਂਦਾ ਹੈ।
ਆਈਟਮ ਨਿਰਯਾਤ ਸੈਟਿੰਗਾਂ ਨੂੰ ਐਕਸੈਸ ਕਰਨ ਲਈ, ਆਈਟਮਾਂ ਦੇ ਸੈਕਸ਼ਨ 'ਤੇ ਜਾਓ, ਅਤੇ ਆਈਟਮ ਸੂਚੀ ਦੇ ਉੱਪਰ ਮੀਨੂੰ ਵਿੱਚ ਨਿਰਯਾਤ ਕਰੋ 'ਤੇ ਕਲਿੱਕ ਕਰੋ :
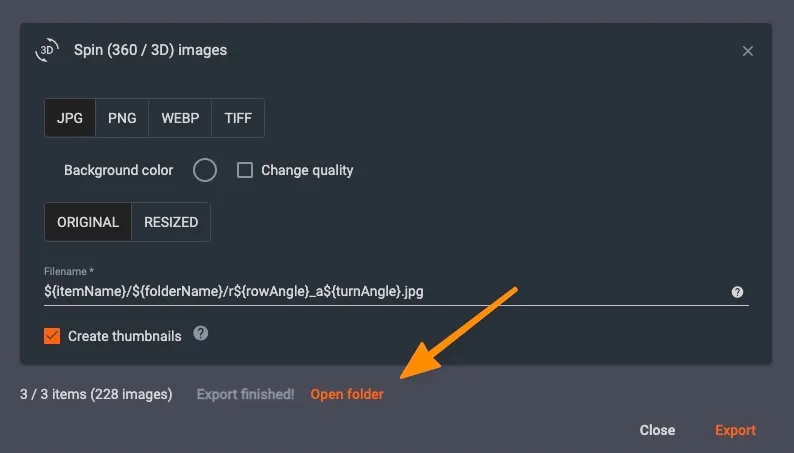
ਅੱਗੇ ਦਿੱਤੀ ਵਿੰਡੋ ਖੁੱਲ੍ਹੇਗੀ, ਜਿਸ ਨਾਲ ਤੁਸੀਂ ਨਿਰਯਾਤ ਸੈਟਿੰਗਾਂ ਨੂੰ ਬਦਲ ਸਕਦੇ ਹੋ:
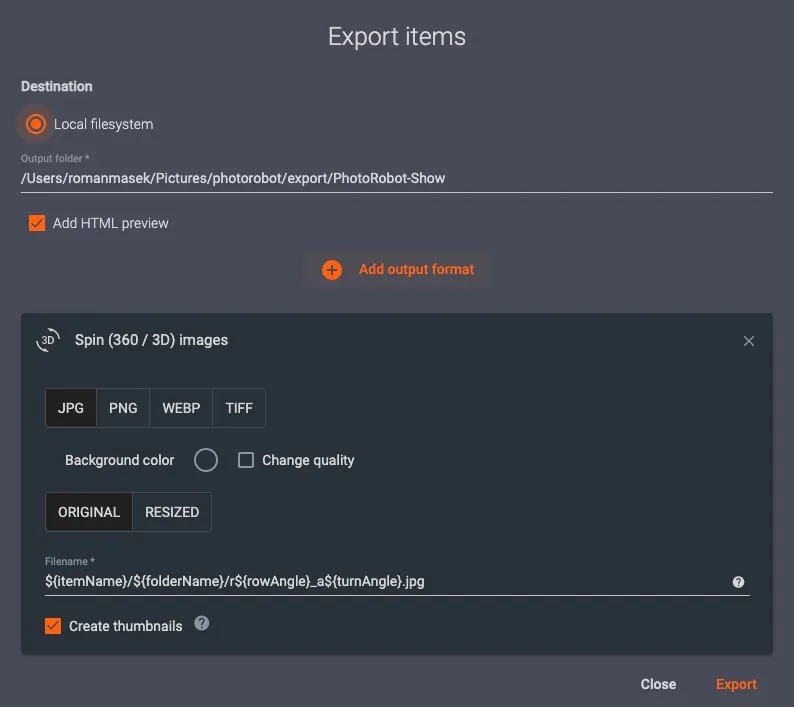
ਇਸ ਵਿੰਡੋ ਦੇ ਹੇਠਲੇ ਸੱਜੇ ਕੋਨੇ ਵਿੱਚ ਨਿਰਯਾਤ ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰਕੇ ਨਿਰਯਾਤ ਪ੍ਰਕਿਰਿਆ ਨੂੰ ਚਲਾਓ।
ਜਦੋਂ ਨਿਰਯਾਤ ਪ੍ਰਗਤੀ ਬਾਰ ਆਪਣੇ ਅੰਤ 'ਤੇ ਪਹੁੰਚ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਤੁਸੀਂ ਆਪਣੇ ਨਿਰਯਾਤ ਕੀਤੇ ਚਿੱਤਰਾਂ ਨੂੰ ਐਕਸੈਸ ਕਰਨ ਲਈ ਓਪਨ ਫੋਲਡਰ 'ਤੇ ਕਲਿੱਕ ਕਰ ਸਕਦੇ ਹੋ।
Cloud ਰਾਹੀਂ ਪਬਲਿਸ਼ ਕਰੋ
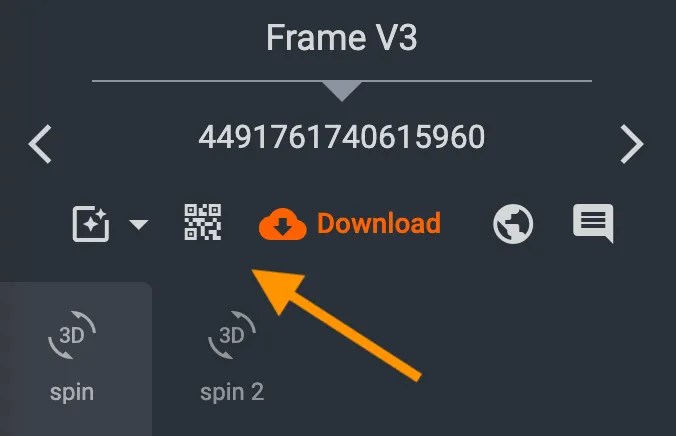
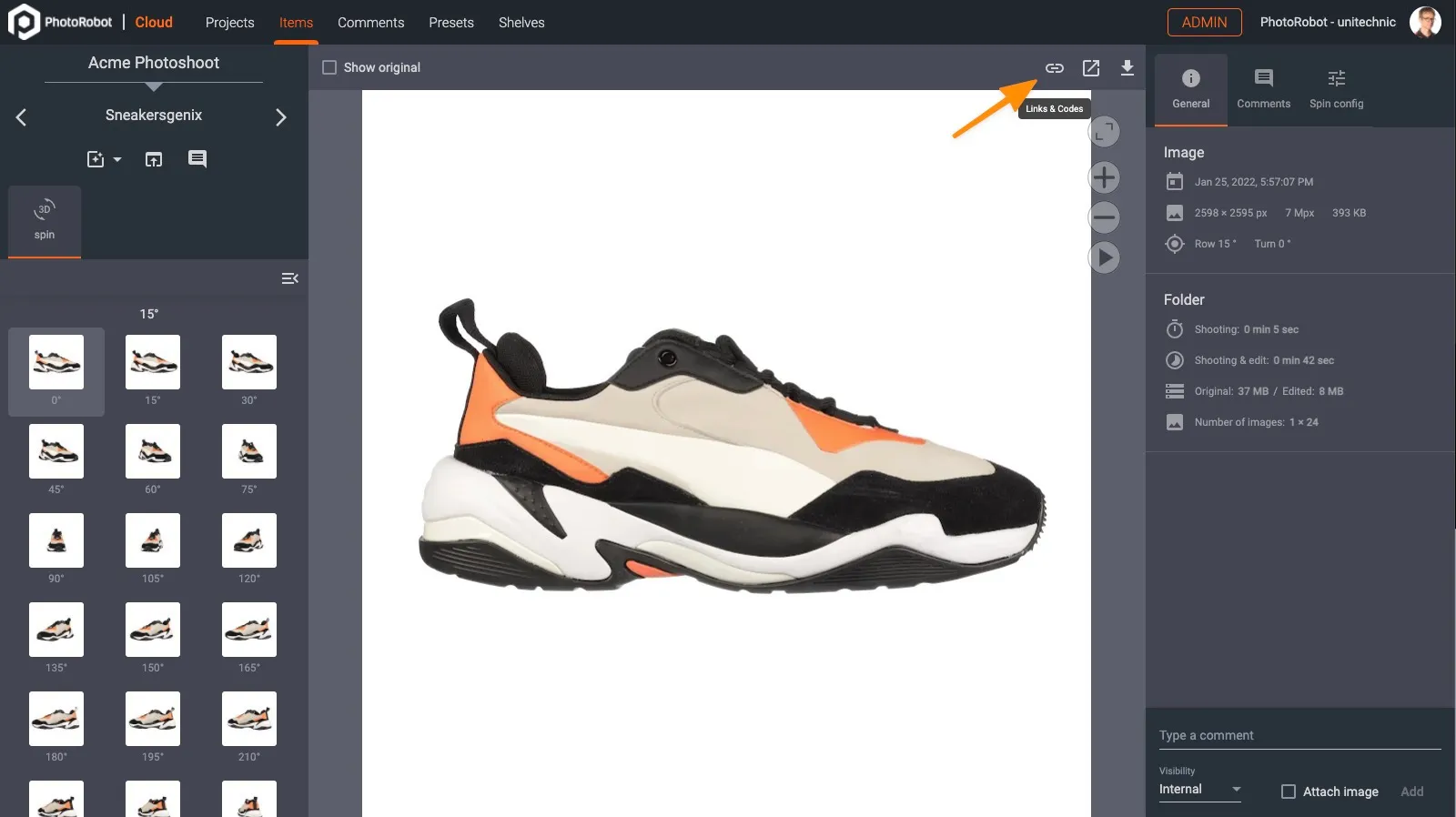
ਜੇਕਰ PhotoRobot Cloud ਸੇਵਾਵਾਂ ਰਾਹੀਂ ਪ੍ਰਕਾਸ਼ਿਤ ਕੀਤਾ ਜਾ ਰਿਹਾ ਹੈ, ਤਾਂ ਪਹਿਲਾਂ ਆਈਟਮ ਨੂੰ ਕਲਾਉਡ ਵਿੱਚ ਖੋਲ੍ਹੋ। ਇੰਟਰਫੇਸ ਕੈਪਚਰ ਕੀਤੇ ਚਿੱਤਰ ਨੂੰ ਦਿਖਾਉਂਦਾ ਹੈ। ਕੋਡ ਅਤੇ ਲਿੰਕ ਬਟਨ 'ਤੇ ਕਲਿੱਕ ਕਰੋ:
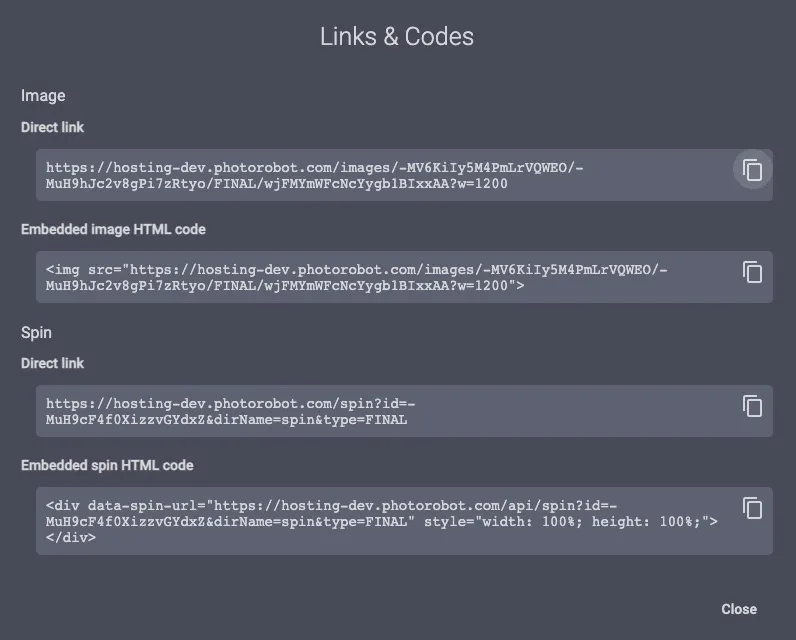
ਚਿੱਤਰ ਜਾਂ ਸਪਿਨ ਨੂੰ ਦੇਖਣ ਲਈ ਡਾਇਰੈਕਟ ਲਿੰਕ ਨੂੰ ਕਾਪੀ ਕਰੋ ਅਤੇ ਇਸ ਨੂੰ ਆਪਣੇ ਬਰਾਊਜ਼ਰ ਵਿੱਚ ਪੇਸਟ ਕਰੋ। ਜੇਕਰ ਸੰਤੁਸ਼ਟ ਹੋਵੇ, ਤਾਂ ਏਮਬੇਡ ਕੀਤੇ ਸਪਿਨ HTML ਕੋਡ ਦੀ ਕਾਪੀ ਕਰੋ। ਡਿਸਪਲੇ ਵਾਸਤੇ ਸਪਿੱਨ ਨੂੰ ਏਮਬੈੱਡ ਕਰਨ ਲਈ ਇਸ ਕੋਡ ਨੂੰ ਆਪਣੇ ਪੰਨੇ 'ਤੇ ਚਿਪਕਾਓ।


EOS ਬਾਗ਼ੀ ਸੀਰੀਜ਼


EOS DSLR ਸੀਰੀਜ਼


EOS M ਮਿਰਰਲੈਸ ਸੀਰੀਜ਼


PowerShot ਸੀਰੀਜ਼


ਕਲੋਜ਼-ਅੱਪ / ਹੈਂਡਹੈਲਡ

ਕੈਨਨ ਈਓਐਸ ਰੈਬਲ ਸੀਰੀਜ਼ ਠੋਸ ਚਿੱਤਰ ਗੁਣਵੱਤਾ, ਸਹਿਜ ਨਿਯੰਤਰਣ ਅਤੇ ਬਹੁਪੱਖੀ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੇ ਨਾਲ ਸ਼ੁਰੂਆਤੀ-ਅਨੁਕੂਲ ਡੀਐਸਐਲਆਰ ਕੈਮਰੇ ਪੇਸ਼ ਕਰਦੀ ਹੈ. ਫੋਟੋਗ੍ਰਾਫੀ ਦੇ ਸ਼ੌਕੀਨਾਂ ਲਈ ਆਦਰਸ਼, ਇਹ ਕੈਮਰੇ ਭਰੋਸੇਮੰਦ ਆਟੋਫੋਕਸ, ਵੈਰੀ-ਐਂਗਲ ਟੱਚਸਕ੍ਰੀਨ, ਅਤੇ ਫੁੱਲ ਐਚਡੀ ਜਾਂ 4ਕੇ ਵੀਡੀਓ ਰਿਕਾਰਡਿੰਗ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਨ.
ਕਨੈਕਸ਼ਨ
ਰੈਜ਼ੋਲੂਸ਼ਨ (MP)
ਰੈਜ਼ੋਲੂਸ਼ਨ
ਕੈਨਨ ਈਓਐਸ ਡੀਐਸਐਲਆਰ ਸੀਰੀਜ਼ ਉੱਚ ਗੁਣਵੱਤਾ ਵਾਲੀਆਂ ਤਸਵੀਰਾਂ, ਤੇਜ਼ ਆਟੋਫੋਕਸ ਅਤੇ ਬਹੁਪੱਖੀਤਾ ਪ੍ਰਦਾਨ ਕਰਦੀ ਹੈ, ਜਿਸ ਨਾਲ ਇਹ ਫੋਟੋਗ੍ਰਾਫੀ ਅਤੇ ਵੀਡੀਓ ਉਤਪਾਦਨ ਦੋਵਾਂ ਲਈ ਆਦਰਸ਼ ਬਣਜਾਂਦੀ ਹੈ.
ਕਨੈਕਸ਼ਨ
ਰੈਜ਼ੋਲੂਸ਼ਨ (MP)
ਰੈਜ਼ੋਲੂਸ਼ਨ
ਕੈਨਨ ਈਓਐਸ ਐਮ ਮਿਰਰਲੈਸ ਸੀਰੀਜ਼ ਕੰਪੈਕਟ ਡਿਜ਼ਾਈਨ ਨੂੰ ਡੀਐਸਐਲਆਰ ਵਰਗੀ ਕਾਰਗੁਜ਼ਾਰੀ ਨਾਲ ਜੋੜਦੀ ਹੈ। ਬਦਲਣਯੋਗ ਲੈਂਜ਼, ਤੇਜ਼ ਆਟੋਫੋਕਸ ਅਤੇ ਉੱਚ ਗੁਣਵੱਤਾ ਵਾਲੇ ਚਿੱਤਰ ਸੈਂਸਰਾਂ ਦੀ ਵਿਸ਼ੇਸ਼ਤਾ ਵਾਲੇ, ਇਹ ਕੈਮਰੇ ਯਾਤਰੀਆਂ ਅਤੇ ਸਮੱਗਰੀ ਨਿਰਮਾਤਾਵਾਂ ਲਈ ਚਿੱਤਰ ਦੀ ਗੁਣਵੱਤਾ ਦੀ ਕੁਰਬਾਨੀ ਦਿੱਤੇ ਬਿਨਾਂ ਪੋਰਟੇਬਿਲਟੀ ਦੀ ਮੰਗ ਕਰਨ ਲਈ ਬਹੁਤ ਵਧੀਆ ਹਨ.
ਕਨੈਕਸ਼ਨ
ਰੈਜ਼ੋਲੂਸ਼ਨ (MP)
ਰੈਜ਼ੋਲੂਸ਼ਨ
ਕੈਨਨ ਪਾਵਰਸ਼ਾਟ ਸੀਰੀਜ਼ ਕੈਜ਼ੂਅਲ ਸ਼ੂਟਰਾਂ ਅਤੇ ਉਤਸ਼ਾਹੀ ਲੋਕਾਂ ਲਈ ਕੰਪੈਕਟ, ਉਪਭੋਗਤਾ-ਅਨੁਕੂਲ ਕੈਮਰੇ ਪੇਸ਼ ਕਰਦੀ ਹੈ। ਸਧਾਰਣ ਪੁਆਇੰਟ-ਐਂਡ-ਸ਼ੂਟ ਤੋਂ ਲੈ ਕੇ ਐਡਵਾਂਸਡ ਜ਼ੂਮ ਕੈਮਰਿਆਂ ਤੱਕ ਦੇ ਮਾਡਲਾਂ ਦੇ ਨਾਲ, ਉਹ ਸਹੂਲਤ, ਠੋਸ ਚਿੱਤਰ ਗੁਣਵੱਤਾ, ਅਤੇ ਚਿੱਤਰ ਸਥਿਰਤਾ ਅਤੇ 4ਕੇ ਵੀਡੀਓ ਵਰਗੀਆਂ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਨ.
ਕਨੈਕਸ਼ਨ
ਰੈਜ਼ੋਲੂਸ਼ਨ (MP)
ਰੈਜ਼ੋਲੂਸ਼ਨ
ਕੈਨਨ ਕਲੋਜ਼-ਅੱਪ ਅਤੇ ਹੈਂਡਹੈਲਡ ਕੈਮਰੇ ਵਿਸਥਾਰਪੂਰਵਕ, ਅੱਪ-ਕਲੋਜ਼ ਫੋਟੋਗ੍ਰਾਫੀ ਅਤੇ ਵੀਡੀਓ ਲਈ ਤਿਆਰ ਕੀਤੇ ਗਏ ਹਨ। ਕੰਪੈਕਟ ਅਤੇ ਵਰਤਣ ਵਿੱਚ ਆਸਾਨ, ਉਹ ਸ਼ੁੱਧਤਾ ਫੋਕਸ, ਉੱਚ-ਰੈਜ਼ੋਲਿਊਸ਼ਨ ਇਮੇਜਿੰਗ, ਅਤੇ ਬਹੁਪੱਖੀ ਮੈਕਰੋ ਸਮਰੱਥਾਵਾਂ ਦੀ ਪੇਸ਼ਕਸ਼ ਕਰਦੇ ਹਨ- ਵੌਗਿੰਗ, ਉਤਪਾਦ ਫੋਟੋਗ੍ਰਾਫੀ, ਅਤੇ ਰਚਨਾਤਮਕ ਕਲੋਜ਼-ਅੱਪਸ ਲਈ ਸੰਪੂਰਨ.


